
Guide to the Stokes Equations using Finite Elements#
The Stokes equations
describe slow flow of an incompressible fluid with velocity \(u\), pressure \(p\), and body force \(f\).
This guide accompanies SNES Example 62> and SNES Example 69><\a>.
The Stokes equations for a fluid, a steady-state form of the Navier-Stokes equations, start with the balance of momentum, just as in elastostatics,
where \(\sigma\) is the stress tensor and \(f\) is the body force, combined with the conservation of mass
where \(\rho\) is the density and \(u\) is the fluid velocity. If we assume that the density is constant, making the fluid incompressible, and that the rheology is Newtonian, meaning that the viscous stress is linearly proportional to the local strain rate, then we have
where \(p\) is the pressure, \(\mu\) is the dynamic shear viscosity, with units \(N\cdot s/m^2\) or \(Pa\cdot s\). If we divide by the constant density, we would have the kinematic viscosity \(\nu\) and a force per unit mass. The second equation demands that the velocity field be divergence-free, indicating that the flow is incompressible. The pressure in this case can be thought of as the Lagrange multiplier enforcing the incompressibility constraint. In the compressible case, we would need an equation of state to relate the pressure to the density, and perhaps temperature.
We will discretize our Stokes equations with finite elements, so the first step is to write a variational weak form of the equations. We choose to use a Ritz-Galerkin setup, so let our velocity \(u \in V\) and pressure \(p \in Q\), so that
where integration by parts has added a boundary integral over the normal derivative of the stress (traction), and natural boundary conditions correspond to stress-free boundaries. We have multiplied the continuity equation by minus one in order to preserve symmetry.
Equation Definition#
The test functions \(v, q\) and their derivatives are determined by the discretization, whereas the form of the integrand is determined by the physics. Given a quadrature rule to evaluate the form integral, we would only need the evaluation of the physics integrand at the quadrature points, given the values of the fields and their derivatives. The entire scheme is detailed in [KnepleyBrownRuppSmith13]. The kernels paired with test functions we will call \(f_0\) and those paired with gradients of test functions will be called \(f_1\).
For example, the kernel for the continuity equation, paired with the pressure test function, is called f0_p and can be seen here
static void f0_p(PetscInt dim, PetscInt Nf, PetscInt NfAux, const PetscInt uOff[], const PetscInt uOff_x[], const PetscScalar u[], const PetscScalar u_t[], const PetscScalar u_x[], const PetscInt aOff[], const PetscInt aOff_x[], const PetscScalar a[], const PetscScalar a_t[], const PetscScalar a_x[], PetscReal t, const PetscReal x[], PetscInt numConstants, const PetscScalar constants[], PetscScalar f0[])
{
PetscInt d;
for (d = 0, f0[0] = 0.0; d < dim; ++d) f0[0] -= u_x[d * dim + d];
}
We use the components of the Jacobian of \(u\) to build up its divergence. For the balance of momentum excluding body force, we test against the gradient of the test function, as seen in f1_u,
static void f1_u(PetscInt dim, PetscInt Nf, PetscInt NfAux, const PetscInt uOff[], const PetscInt uOff_x[], const PetscScalar u[], const PetscScalar u_t[], const PetscScalar u_x[], const PetscInt aOff[], const PetscInt aOff_x[], const PetscScalar a[], const PetscScalar a_t[], const PetscScalar a_x[], PetscReal t, const PetscReal x[], PetscInt numConstants, const PetscScalar constants[], PetscScalar f1[])
{
const PetscReal mu = PetscRealPart(constants[0]);
const PetscInt Nc = uOff[1] - uOff[0];
PetscInt c, d;
for (c = 0; c < Nc; ++c) {
for (d = 0; d < dim; ++d) f1[c * dim + d] = mu * (u_x[c * dim + d] + u_x[d * dim + c]);
f1[c * dim + c] -= u[uOff[1]];
}
Notice how the pressure \(p\) is referred to using u[uOff[1]] so that we can have many fields with different numbers of components. DMPlex uses these point functions to construct the residual. A similar set of point functions is also used to build the Jacobian. The last piece of our physics specification is the construction of exact solutions using the Method of Manufactured Solutions (MMS).
MMS Solutions#
An MMS solution is chosen to elucidate some property of the problem, and to check that it is being solved accurately, since the error can be calculated explicitly. For our Stokes problem, we first choose a solution with quadratic velocity and linear pressure,
static PetscErrorCode quadratic_u(PetscInt dim, PetscReal time, const PetscReal x[], PetscInt Nc, PetscScalar *u, PetscCtx ctx)
{
PetscInt c;
u[0] = (dim - 1) * PetscSqr(x[0]);
for (c = 1; c < Nc; ++c) {
u[0] += PetscSqr(x[c]);
u[c] = 2.0 * PetscSqr(x[0]) - 2.0 * x[0] * x[c];
}
return PETSC_SUCCESS;
}
static PetscErrorCode quadratic_p(PetscInt dim, PetscReal time, const PetscReal x[], PetscInt Nc, PetscScalar *u, PetscCtx ctx)
{
PetscInt d;
u[0] = -0.5 * dim;
for (d = 0; d < dim; ++d) u[0] += x[d];
return PETSC_SUCCESS;
}
static void f0_quadratic_u(PetscInt dim, PetscInt Nf, PetscInt NfAux, const PetscInt uOff[], const PetscInt uOff_x[], const PetscScalar u[], const PetscScalar u_t[], const PetscScalar u_x[], const PetscInt aOff[], const PetscInt aOff_x[], const PetscScalar a[], const PetscScalar a_t[], const PetscScalar a_x[], PetscReal t, const PetscReal x[], PetscInt numConstants, const PetscScalar constants[], PetscScalar f0[])
{
const PetscReal mu = PetscRealPart(constants[0]);
PetscInt d;
f0[0] = (dim - 1) * 4.0 * mu - 1.0;
for (d = 1; d < dim; ++d) f0[d] = 4.0 * mu - 1.0;
}
/* Trigonometric MMS Solution
2D:
u = sin(pi x) + sin(pi y)
v = -pi cos(pi x) y
p = sin(2 pi x) + sin(2 pi y)
f = <2pi cos(2 pi x) + mu pi^2 sin(pi x) + mu pi^2 sin(pi y), 2pi cos(2 pi y) - mu pi^3 cos(pi x) y>
so that
e(u) = (grad u + grad u^T) = / 2pi cos(pi x) pi cos(pi y) + pi^2 sin(pi x) y \
\ pi cos(pi y) + pi^2 sin(pi x) y -2pi cos(pi x) /
div mu e(u) - \nabla p + f = mu <-pi^2 sin(pi x) - pi^2 sin(pi y), pi^3 cos(pi x) y> - <2pi cos(2 pi x), 2pi cos(2 pi y)> + <f_x, f_y> = 0
\nabla \cdot u = pi cos(pi x) - pi cos(pi x) = 0
3D:
u = 2 sin(pi x) + sin(pi y) + sin(pi z)
v = -pi cos(pi x) y
w = -pi cos(pi x) z
p = sin(2 pi x) + sin(2 pi y) + sin(2 pi z)
f = <2pi cos(2 pi x) + mu 2pi^2 sin(pi x) + mu pi^2 sin(pi y) + mu pi^2 sin(pi z), 2pi cos(2 pi y) - mu pi^3 cos(pi x) y, 2pi cos(2 pi z) - mu pi^3 cos(pi x) z>
so that
e(u) = (grad u + grad u^T) = / 4pi cos(pi x) pi cos(pi y) + pi^2 sin(pi x) y pi cos(pi z) + pi^2 sin(pi x) z \
| pi cos(pi y) + pi^2 sin(pi x) y -2pi cos(pi x) 0 |
\ pi cos(pi z) + pi^2 sin(pi x) z 0 -2pi cos(pi x) /
div mu e(u) - \nabla p + f = mu <-2pi^2 sin(pi x) - pi^2 sin(pi y) - pi^2 sin(pi z), pi^3 cos(pi x) y, pi^3 cos(pi x) z> - <2pi cos(2 pi x), 2pi cos(2 pi y), 2pi cos(2 pi z)> + <f_x, f_y, f_z> = 0
\nabla \cdot u = 2 pi cos(pi x) - pi cos(pi x) - pi cos(pi x) = 0
*/
static PetscErrorCode trig_u(PetscInt dim, PetscReal time, const PetscReal x[], PetscInt Nc, PetscScalar *u, PetscCtx ctx)
{
PetscInt c;
u[0] = (dim - 1) * PetscSinReal(PETSC_PI * x[0]);
for (c = 1; c < Nc; ++c) {
u[0] += PetscSinReal(PETSC_PI * x[c]);
u[c] = -PETSC_PI * PetscCosReal(PETSC_PI * x[0]) * x[c];
}
return PETSC_SUCCESS;
}
static PetscErrorCode trig_p(PetscInt dim, PetscReal time, const PetscReal x[], PetscInt Nc, PetscScalar *u, PetscCtx ctx)
{
PetscInt d;
for (d = 0, u[0] = 0.0; d < dim; ++d) u[0] += PetscSinReal(2.0 * PETSC_PI * x[d]);
return PETSC_SUCCESS;
}
static void f0_trig_u(PetscInt dim, PetscInt Nf, PetscInt NfAux, const PetscInt uOff[], const PetscInt uOff_x[], const PetscScalar u[], const PetscScalar u_t[], const PetscScalar u_x[], const PetscInt aOff[], const PetscInt aOff_x[], const PetscScalar a[], const PetscScalar a_t[], const PetscScalar a_x[], PetscReal t, const PetscReal x[], PetscInt numConstants, const PetscScalar constants[], PetscScalar f0[])
{
const PetscReal mu = PetscRealPart(constants[0]);
PetscInt d;
f0[0] = -2.0 * PETSC_PI * PetscCosReal(2.0 * PETSC_PI * x[0]) - (dim - 1) * mu * PetscSqr(PETSC_PI) * PetscSinReal(PETSC_PI * x[0]);
for (d = 1; d < dim; ++d) {
f0[0] -= mu * PetscSqr(PETSC_PI) * PetscSinReal(PETSC_PI * x[d]);
f0[d] = -2.0 * PETSC_PI * PetscCosReal(2.0 * PETSC_PI * x[d]) + mu * PetscPowRealInt(PETSC_PI, 3) * PetscCosReal(PETSC_PI * x[0]) * x[d];
}
}
/* Inline helpers for computing exact velocity in void boundary kernels */
static inline void ExactVelocityQuadratic(PetscInt dim, const PetscReal x[], PetscScalar g[])
{
PetscInt c;
g[0] = (dim - 1) * x[0] * x[0];
for (c = 1; c < dim; ++c) {
g[0] += x[c] * x[c];
g[c] = 2.0 * x[0] * x[0] - 2.0 * x[0] * x[c];
}
}
static inline void ExactVelocityTrig(PetscInt dim, const PetscReal x[], PetscScalar g[])
{
PetscInt c;
g[0] = (dim - 1) * PetscSinReal(PETSC_PI * x[0]);
for (c = 1; c < dim; ++c) {
g[0] += PetscSinReal(PETSC_PI * x[c]);
g[c] = -PETSC_PI * PetscCosReal(PETSC_PI * x[0]) * x[c];
}
}
/* Nitsche boundary residual kernels for velocity (field 0)
f0_bd_u[c] = -mu * sum_d (u_x[c*dim+d] + u_x[d*dim+c]) * n[d] (consistency: stress flux from IBP)
+ p * n[c] (pressure flux from IBP)
+ penalty * (u[c] - g[c]) (penalty) */
static void f0_bd_nitsche_quadratic_u(PetscInt dim, PetscInt Nf, PetscInt NfAux, const PetscInt uOff[], const PetscInt uOff_x[], const PetscScalar u[], const PetscScalar u_t[], const PetscScalar u_x[], const PetscInt aOff[], const PetscInt aOff_x[], const PetscScalar a[], const PetscScalar a_t[], const PetscScalar a_x[], PetscReal t, const PetscReal x[], const PetscReal n[], PetscInt numConstants, const PetscScalar constants[], PetscScalar f0[])
{
const PetscReal mu = PetscRealPart(constants[0]);
const PetscReal penalty = PetscRealPart(constants[1]);
PetscScalar g[3];
PetscInt c, d;
ExactVelocityQuadratic(dim, x, g);
for (c = 0; c < dim; ++c) {
f0[c] = penalty * (u[c] - g[c]) + u[uOff[1]] * n[c];
for (d = 0; d < dim; ++d) f0[c] -= mu * (u_x[c * dim + d] + u_x[d * dim + c]) * n[d];
}
}
static void f0_bd_nitsche_trig_u(PetscInt dim, PetscInt Nf, PetscInt NfAux, const PetscInt uOff[], const PetscInt uOff_x[], const PetscScalar u[], const PetscScalar u_t[], const PetscScalar u_x[], const PetscInt aOff[], const PetscInt aOff_x[], const PetscScalar a[], const PetscScalar a_t[], const PetscScalar a_x[], PetscReal t, const PetscReal x[], const PetscReal n[], PetscInt numConstants, const PetscScalar constants[], PetscScalar f0[])
{
const PetscReal mu = PetscRealPart(constants[0]);
const PetscReal penalty = PetscRealPart(constants[1]);
PetscScalar g[3];
PetscInt c, d;
ExactVelocityTrig(dim, x, g);
for (c = 0; c < dim; ++c) {
f0[c] = penalty * (u[c] - g[c]) + u[uOff[1]] * n[c];
for (d = 0; d < dim; ++d) f0[c] -= mu * (u_x[c * dim + d] + u_x[d * dim + c]) * n[d];
}
}
/* f1_bd_u[c*dim+d] = -mu * (n[d]*(u[c]-g[c]) + n[c]*(u[d]-g[d])) (symmetry / adjoint consistency) */
static void f1_bd_nitsche_quadratic_u(PetscInt dim, PetscInt Nf, PetscInt NfAux, const PetscInt uOff[], const PetscInt uOff_x[], const PetscScalar u[], const PetscScalar u_t[], const PetscScalar u_x[], const PetscInt aOff[], const PetscInt aOff_x[], const PetscScalar a[], const PetscScalar a_t[], const PetscScalar a_x[], PetscReal t, const PetscReal x[], const PetscReal n[], PetscInt numConstants, const PetscScalar constants[], PetscScalar f1[])
{
const PetscReal mu = PetscRealPart(constants[0]);
PetscScalar g[3];
PetscInt c, d;
ExactVelocityQuadratic(dim, x, g);
for (c = 0; c < dim; ++c)
for (d = 0; d < dim; ++d) f1[c * dim + d] = -mu * (n[d] * (u[c] - g[c]) + n[c] * (u[d] - g[d]));
}
static void f1_bd_nitsche_trig_u(PetscInt dim, PetscInt Nf, PetscInt NfAux, const PetscInt uOff[], const PetscInt uOff_x[], const PetscScalar u[], const PetscScalar u_t[], const PetscScalar u_x[], const PetscInt aOff[], const PetscInt aOff_x[], const PetscScalar a[], const PetscScalar a_t[], const PetscScalar a_x[], PetscReal t, const PetscReal x[], const PetscReal n[], PetscInt numConstants, const PetscScalar constants[], PetscScalar f1[])
{
const PetscReal mu = PetscRealPart(constants[0]);
PetscScalar g[3];
PetscInt c, d;
ExactVelocityTrig(dim, x, g);
for (c = 0; c < dim; ++c)
for (d = 0; d < dim; ++d) f1[c * dim + d] = -mu * (n[d] * (u[c] - g[c]) + n[c] * (u[d] - g[d]));
}
/* Nitsche boundary residual kernels for pressure (field 1)
f0_bd_p = sum_d n[d] * (u[d] - g[d]) (continuity equation boundary correction) */
static void f0_bd_nitsche_quadratic_p(PetscInt dim, PetscInt Nf, PetscInt NfAux, const PetscInt uOff[], const PetscInt uOff_x[], const PetscScalar u[], const PetscScalar u_t[], const PetscScalar u_x[], const PetscInt aOff[], const PetscInt aOff_x[], const PetscScalar a[], const PetscScalar a_t[], const PetscScalar a_x[], PetscReal t, const PetscReal x[], const PetscReal n[], PetscInt numConstants, const PetscScalar constants[], PetscScalar f0[])
{
PetscScalar g[3];
PetscInt d;
ExactVelocityQuadratic(dim, x, g);
f0[0] = 0.0;
for (d = 0; d < dim; ++d) f0[0] += n[d] * (u[d] - g[d]);
}
static void f0_bd_nitsche_trig_p(PetscInt dim, PetscInt Nf, PetscInt NfAux, const PetscInt uOff[], const PetscInt uOff_x[], const PetscScalar u[], const PetscScalar u_t[], const PetscScalar u_x[], const PetscInt aOff[], const PetscInt aOff_x[], const PetscScalar a[], const PetscScalar a_t[], const PetscScalar a_x[], PetscReal t, const PetscReal x[], const PetscReal n[], PetscInt numConstants, const PetscScalar constants[], PetscScalar f0[])
{
PetscScalar g[3];
PetscInt d;
ExactVelocityTrig(dim, x, g);
f0[0] = 0.0;
for (d = 0; d < dim; ++d) f0[0] += n[d] * (u[d] - g[d]);
}
/* Nitsche boundary Jacobian kernels (solution-independent)
g0_bd_uu[c*Nc+d] = delta(c,d) * penalty (penalty Jacobian) */
static void g0_bd_uu(PetscInt dim, PetscInt Nf, PetscInt NfAux, const PetscInt uOff[], const PetscInt uOff_x[], const PetscScalar u[], const PetscScalar u_t[], const PetscScalar u_x[], const PetscInt aOff[], const PetscInt aOff_x[], const PetscScalar a[], const PetscScalar a_t[], const PetscScalar a_x[], PetscReal t, PetscReal u_tShift, const PetscReal x[], const PetscReal n[], PetscInt numConstants, const PetscScalar constants[], PetscScalar g0[])
{
const PetscReal penalty = PetscRealPart(constants[1]);
const PetscInt Nc = uOff[1] - uOff[0];
PetscInt c;
for (c = 0; c < Nc; ++c) g0[c * Nc + c] = penalty;
}
/* g1_bd_uu[(c*Nc+d)*dim+e] = -mu * (delta(c,d)*n[e] + delta(c,e)*n[d]) (consistency Jacobian: df0/du_x) */
static void g1_bd_uu(PetscInt dim, PetscInt Nf, PetscInt NfAux, const PetscInt uOff[], const PetscInt uOff_x[], const PetscScalar u[], const PetscScalar u_t[], const PetscScalar u_x[], const PetscInt aOff[], const PetscInt aOff_x[], const PetscScalar a[], const PetscScalar a_t[], const PetscScalar a_x[], PetscReal t, PetscReal u_tShift, const PetscReal x[], const PetscReal n[], PetscInt numConstants, const PetscScalar constants[], PetscScalar g1[])
{
const PetscReal mu = PetscRealPart(constants[0]);
const PetscInt Nc = uOff[1] - uOff[0];
PetscInt c, d, e;
for (c = 0; c < Nc; ++c)
for (d = 0; d < Nc; ++d)
for (e = 0; e < dim; ++e) g1[(c * Nc + d) * dim + e] = -mu * ((c == d ? 1.0 : 0.0) * n[e] + (c == e ? 1.0 : 0.0) * n[d]);
}
/* g2_bd_uu[(c*Nc+d)*dim+e] = -mu * (n[e]*delta(c,d) + n[c]*delta(e,d)) (symmetry Jacobian: df1/du) */
static void g2_bd_uu(PetscInt dim, PetscInt Nf, PetscInt NfAux, const PetscInt uOff[], const PetscInt uOff_x[], const PetscScalar u[], const PetscScalar u_t[], const PetscScalar u_x[], const PetscInt aOff[], const PetscInt aOff_x[], const PetscScalar a[], const PetscScalar a_t[], const PetscScalar a_x[], PetscReal t, PetscReal u_tShift, const PetscReal x[], const PetscReal n[], PetscInt numConstants, const PetscScalar constants[], PetscScalar g2[])
{
const PetscReal mu = PetscRealPart(constants[0]);
const PetscInt Nc = uOff[1] - uOff[0];
PetscInt c, d, e;
for (c = 0; c < Nc; ++c)
for (d = 0; d < Nc; ++d)
for (e = 0; e < dim; ++e) g2[(c * Nc + d) * dim + e] = -mu * (n[e] * (c == d ? 1.0 : 0.0) + n[c] * (e == d ? 1.0 : 0.0));
}
/* g0_bd_up[c*1+0] = n[c] (velocity-pressure coupling: df0_u/dp) */
static void g0_bd_up(PetscInt dim, PetscInt Nf, PetscInt NfAux, const PetscInt uOff[], const PetscInt uOff_x[], const PetscScalar u[], const PetscScalar u_t[], const PetscScalar u_x[], const PetscInt aOff[], const PetscInt aOff_x[], const PetscScalar a[], const PetscScalar a_t[], const PetscScalar a_x[], PetscReal t, PetscReal u_tShift, const PetscReal x[], const PetscReal n[], PetscInt numConstants, const PetscScalar constants[], PetscScalar g0[])
{
PetscInt c;
for (c = 0; c < dim; ++c) g0[c] = n[c];
}
/* g0_bd_pu[0*Nc+d] = n[d] (pressure-velocity coupling: df0_p/du) */
static void g0_bd_pu(PetscInt dim, PetscInt Nf, PetscInt NfAux, const PetscInt uOff[], const PetscInt uOff_x[], const PetscScalar u[], const PetscScalar u_t[], const PetscScalar u_x[], const PetscInt aOff[], const PetscInt aOff_x[], const PetscScalar a[], const PetscScalar a_t[], const PetscScalar a_x[], PetscReal t, PetscReal u_tShift, const PetscReal x[], const PetscReal n[], PetscInt numConstants, const PetscScalar constants[], PetscScalar g0[])
{
PetscInt d;
for (d = 0; d < dim; ++d) g0[d] = n[d];
}
static PetscErrorCode ProcessOptions(MPI_Comm comm, AppCtx *options)
{
PetscInt sol, bc;
PetscFunctionBeginUser;
options->sol = SOL_QUADRATIC;
options->bc = BC_ESSENTIAL;
PetscOptionsBegin(comm, "", "Stokes Problem Options", "DMPLEX");
sol = options->sol;
PetscCall(PetscOptionsEList("-sol", "The MMS solution", "ex62.c", SolTypes, PETSC_STATIC_ARRAY_LENGTH(SolTypes) - 3, SolTypes[options->sol], &sol, NULL));
options->sol = (SolType)sol;
bc = options->bc;
PetscCall(PetscOptionsEList("-bc", "The boundary condition type", "ex62.c", BCTypes, PETSC_STATIC_ARRAY_LENGTH(BCTypes) - 3, BCTypes[options->bc], &bc, NULL));
options->bc = (BCType)bc;
PetscOptionsEnd();
PetscFunctionReturn(PETSC_SUCCESS);
}
static PetscErrorCode CreateMesh(MPI_Comm comm, AppCtx *user, DM *dm)
{
PetscFunctionBeginUser;
PetscCall(DMCreate(comm, dm));
PetscCall(DMSetType(*dm, DMPLEX));
PetscCall(DMSetFromOptions(*dm));
PetscCall(DMViewFromOptions(*dm, NULL, "-dm_view"));
PetscFunctionReturn(PETSC_SUCCESS);
}
static PetscErrorCode SetupParameters(MPI_Comm comm, AppCtx *ctx)
{
Parameter *p;
PetscFunctionBeginUser;
/* setup PETSc parameter bag */
PetscCall(PetscBagCreate(PETSC_COMM_SELF, sizeof(Parameter), &ctx->bag));
PetscCall(PetscBagGetData(ctx->bag, &p));
PetscCall(PetscBagSetName(ctx->bag, "par", "Stokes Parameters"));
PetscCall(PetscBagRegisterScalar(ctx->bag, &p->mu, 1.0, "mu", "Dynamic Shear Viscosity, Pa s"));
PetscCall(PetscBagRegisterScalar(ctx->bag, &p->eta, 100.0, "eta", "Nitsche penalty parameter (dimensionless)"));
PetscCall(PetscBagSetFromOptions(ctx->bag));
{
PetscViewer viewer;
PetscViewerFormat format;
PetscBool flg;
PetscCall(PetscOptionsCreateViewer(comm, NULL, NULL, "-param_view", &viewer, &format, &flg));
if (flg) {
PetscCall(PetscViewerPushFormat(viewer, format));
PetscCall(PetscBagView(ctx->bag, viewer));
PetscCall(PetscViewerFlush(viewer));
PetscCall(PetscViewerPopFormat(viewer));
PetscCall(PetscViewerDestroy(&viewer));
}
}
PetscFunctionReturn(PETSC_SUCCESS);
}
static PetscErrorCode SetupEqn(DM dm, AppCtx *user)
{
PetscErrorCode (*exactFuncs[2])(PetscInt, PetscReal, const PetscReal[], PetscInt, PetscScalar *, void *);
void (*f0_bd_u)(PetscInt, PetscInt, PetscInt, const PetscInt[], const PetscInt[], const PetscScalar[], const PetscScalar[], const PetscScalar[], const PetscInt[], const PetscInt[], const PetscScalar[], const PetscScalar[], const PetscScalar[], PetscReal, const PetscReal[], const PetscReal[], PetscInt, const PetscScalar[], PetscScalar[]);
void (*f1_bd_u)(PetscInt, PetscInt, PetscInt, const PetscInt[], const PetscInt[], const PetscScalar[], const PetscScalar[], const PetscScalar[], const PetscInt[], const PetscInt[], const PetscScalar[], const PetscScalar[], const PetscScalar[], PetscReal, const PetscReal[], const PetscReal[], PetscInt, const PetscScalar[], PetscScalar[]);
void (*f0_bd_p)(PetscInt, PetscInt, PetscInt, const PetscInt[], const PetscInt[], const PetscScalar[], const PetscScalar[], const PetscScalar[], const PetscInt[], const PetscInt[], const PetscScalar[], const PetscScalar[], const PetscScalar[], PetscReal, const PetscReal[], const PetscReal[], PetscInt, const PetscScalar[], PetscScalar[]);
PetscDS ds;
DMLabel label;
const PetscInt id = 1;
PetscFunctionBeginUser;
PetscCall(DMGetDS(dm, &ds));
switch (user->sol) {
case SOL_QUADRATIC:
PetscCall(PetscDSSetResidual(ds, 0, f0_quadratic_u, f1_u));
exactFuncs[0] = quadratic_u;
exactFuncs[1] = quadratic_p;
f0_bd_u = f0_bd_nitsche_quadratic_u;
f1_bd_u = f1_bd_nitsche_quadratic_u;
f0_bd_p = f0_bd_nitsche_quadratic_p;
break;
case SOL_TRIG:
PetscCall(PetscDSSetResidual(ds, 0, f0_trig_u, f1_u));
exactFuncs[0] = trig_u;
exactFuncs[1] = trig_p;
f0_bd_u = f0_bd_nitsche_trig_u;
f1_bd_u = f1_bd_nitsche_trig_u;
f0_bd_p = f0_bd_nitsche_trig_p;
break;
default:
SETERRQ(PetscObjectComm((PetscObject)dm), PETSC_ERR_ARG_WRONG, "Unsupported solution type: %s (%d)", SolTypes[PetscMin(user->sol, SOL_UNKNOWN)], user->sol);
}
PetscCall(PetscDSSetResidual(ds, 1, f0_p, NULL));
PetscCall(PetscDSSetJacobian(ds, 0, 0, NULL, NULL, NULL, g3_uu));
PetscCall(PetscDSSetJacobian(ds, 0, 1, NULL, NULL, g2_up, NULL));
PetscCall(PetscDSSetJacobian(ds, 1, 0, NULL, g1_pu, NULL, NULL));
PetscCall(PetscDSSetJacobianPreconditioner(ds, 0, 0, NULL, NULL, NULL, g3_uu));
PetscCall(PetscDSSetJacobianPreconditioner(ds, 1, 1, g0_pp, NULL, NULL, NULL));
PetscCall(PetscDSSetExactSolution(ds, 0, exactFuncs[0], user));
PetscCall(PetscDSSetExactSolution(ds, 1, exactFuncs[1], user));
PetscCall(DMGetLabel(dm, "marker", &label));
switch (user->bc) {
case BC_ESSENTIAL:
PetscCall(DMAddBoundary(dm, DM_BC_ESSENTIAL, "wall", label, 1, &id, 0, 0, NULL, (PetscVoidFn *)exactFuncs[0], NULL, user, NULL));
break;
case BC_NITSCHE: {
PetscWeakForm wf;
DMLabel faceSetsLabel;
IS valueIS;
const PetscInt *faceSetValues;
PetscInt numValues, bd, i;
PetscCall(DMGetLabel(dm, "Face Sets", &faceSetsLabel));
PetscCall(DMLabelGetNumValues(faceSetsLabel, &numValues));
PetscCall(DMLabelGetValueIS(faceSetsLabel, &valueIS));
PetscCall(ISGetIndices(valueIS, &faceSetValues));
/* Velocity boundary: natural BC with Nitsche terms on all boundary faces */
PetscCall(DMAddBoundary(dm, DM_BC_NATURAL, "wall", faceSetsLabel, numValues, faceSetValues, 0, 0, NULL, NULL, NULL, user, &bd));
PetscCall(PetscDSGetBoundary(ds, bd, &wf, NULL, NULL, NULL, NULL, NULL, NULL, NULL, NULL, NULL, NULL, NULL));
for (i = 0; i < numValues; ++i) {
/* Velocity residual (field 0): f0 and f1 */
PetscCall(PetscWeakFormSetIndexBdResidual(wf, faceSetsLabel, faceSetValues[i], 0, 0, 0, f0_bd_u, 0, f1_bd_u));
/* Velocity-velocity Jacobian (field 0, field 0): g0 (penalty), g1 (consistency), g2 (symmetry) */
PetscCall(PetscWeakFormSetIndexBdJacobian(wf, faceSetsLabel, faceSetValues[i], 0, 0, 0, 0, g0_bd_uu, 0, g1_bd_uu, 0, g2_bd_uu, 0, NULL));
/* Velocity-pressure Jacobian (field 0, field 1): g0 (pressure coupling) */
PetscCall(PetscWeakFormSetIndexBdJacobian(wf, faceSetsLabel, faceSetValues[i], 0, 1, 0, 0, g0_bd_up, 0, NULL, 0, NULL, 0, NULL));
}
/* Pressure boundary: natural BC for continuity equation correction */
PetscCall(DMAddBoundary(dm, DM_BC_NATURAL, "wall_pres", faceSetsLabel, numValues, faceSetValues, 1, 0, NULL, NULL, NULL, user, &bd));
PetscCall(PetscDSGetBoundary(ds, bd, &wf, NULL, NULL, NULL, NULL, NULL, NULL, NULL, NULL, NULL, NULL, NULL));
for (i = 0; i < numValues; ++i) {
/* Pressure residual (field 1): f0 */
PetscCall(PetscWeakFormSetIndexBdResidual(wf, faceSetsLabel, faceSetValues[i], 1, 0, 0, f0_bd_p, 0, NULL));
/* Pressure-velocity Jacobian (field 1, field 0): g0 */
PetscCall(PetscWeakFormSetIndexBdJacobian(wf, faceSetsLabel, faceSetValues[i], 1, 0, 0, 0, g0_bd_pu, 0, NULL, 0, NULL, 0, NULL));
}
PetscCall(ISRestoreIndices(valueIS, &faceSetValues));
PetscCall(ISDestroy(&valueIS));
} break;
default:
SETERRQ(PetscObjectComm((PetscObject)dm), PETSC_ERR_ARG_WRONG, "Unsupported BC type: %s (%d)", BCTypes[PetscMin(user->bc, BC_UNKNOWN)], user->bc);
}
/* Make constant values available to pointwise functions */
{
Parameter *param;
PetscScalar constants[2];
PetscCall(PetscBagGetData(user->bag, ¶m));
constants[0] = param->mu; /* dynamic shear viscosity, Pa s */
constants[1] = 0.0; /* Nitsche penalty (set below if needed) */
if (user->bc == BC_NITSCHE) {
/* Compute cell size h from mesh */
PetscInt dim, cStart;
PetscReal vol, h;
PetscCall(DMGetDimension(dm, &dim));
PetscCall(DMPlexGetHeightStratum(dm, 0, &cStart, NULL));
PetscCall(DMPlexComputeCellGeometryFVM(dm, cStart, &vol, NULL, NULL));
h = PetscPowReal(vol, 1.0 / dim);
constants[1] = PetscRealPart(param->eta) * PetscRealPart(param->mu) / h;
}
PetscCall(PetscDSSetConstants(ds, 2, constants));
}
PetscFunctionReturn(PETSC_SUCCESS);
}
static PetscErrorCode zero(PetscInt dim, PetscReal time, const PetscReal x[], PetscInt Nc, PetscScalar *u, PetscCtx ctx)
{
PetscInt c;
for (c = 0; c < Nc; ++c) u[c] = 0.0;
return PETSC_SUCCESS;
}
static PetscErrorCode one(PetscInt dim, PetscReal time, const PetscReal x[], PetscInt Nc, PetscScalar *u, PetscCtx ctx)
{
PetscInt c;
for (c = 0; c < Nc; ++c) u[c] = 1.0;
return PETSC_SUCCESS;
}
static PetscErrorCode CreatePressureNullSpace(DM dm, PetscInt origField, PetscInt field, MatNullSpace *nullspace)
{
Vec vec;
PetscErrorCode (*funcs[2])(PetscInt dim, PetscReal time, const PetscReal x[], PetscInt Nf, PetscScalar *u, PetscCtx ctx) = {zero, one};
PetscFunctionBeginUser;
PetscCheck(origField == 1, PetscObjectComm((PetscObject)dm), PETSC_ERR_ARG_WRONG, "Field %" PetscInt_FMT " should be 1 for pressure", origField);
funcs[field] = one;
{
PetscDS ds;
PetscCall(DMGetDS(dm, &ds));
PetscCall(PetscObjectViewFromOptions((PetscObject)ds, NULL, "-ds_view"));
}
PetscCall(DMCreateGlobalVector(dm, &vec));
PetscCall(DMProjectFunction(dm, 0.0, funcs, NULL, INSERT_ALL_VALUES, vec));
PetscCall(VecNormalize(vec, NULL));
PetscCall(MatNullSpaceCreate(PetscObjectComm((PetscObject)dm), PETSC_FALSE, 1, &vec, nullspace));
PetscCall(VecDestroy(&vec));
/* New style for field null spaces */
{
PetscObject pressure;
MatNullSpace nullspacePres;
PetscCall(DMGetField(dm, field, NULL, &pressure));
PetscCall(MatNullSpaceCreate(PetscObjectComm(pressure), PETSC_TRUE, 0, NULL, &nullspacePres));
PetscCall(PetscObjectCompose(pressure, "nullspace", (PetscObject)nullspacePres));
PetscCall(MatNullSpaceDestroy(&nullspacePres));
}
PetscFunctionReturn(PETSC_SUCCESS);
}
static PetscErrorCode SetupProblem(DM dm, PetscErrorCode (*setupEqn)(DM, AppCtx *), AppCtx *user)
{
DM cdm = dm;
PetscQuadrature q = NULL;
PetscBool simplex;
PetscInt dim, Nf = 2, f, Nc[2];
const char *name[2] = {"velocity", "pressure"};
const char *prefix[2] = {"vel_", "pres_"};
PetscFunctionBegin;
PetscCall(DMGetDimension(dm, &dim));
PetscCall(DMPlexIsSimplex(dm, &simplex));
Nc[0] = dim;
Nc[1] = 1;
for (f = 0; f < Nf; ++f) {
PetscFE fe;
PetscCall(PetscFECreateDefault(PETSC_COMM_SELF, dim, Nc[f], simplex, prefix[f], -1, &fe));
PetscCall(PetscObjectSetName((PetscObject)fe, name[f]));
if (!q) PetscCall(PetscFEGetQuadrature(fe, &q));
PetscCall(PetscFESetQuadrature(fe, q));
PetscCall(DMSetField(dm, f, NULL, (PetscObject)fe));
PetscCall(PetscFEDestroy(&fe));
}
PetscCall(DMCreateDS(dm));
PetscCall((*setupEqn)(dm, user));
while (cdm) {
PetscCall(DMCopyDisc(dm, cdm));
PetscCall(DMSetNullSpaceConstructor(cdm, 1, CreatePressureNullSpace));
PetscCall(DMGetCoarseDM(cdm, &cdm));
}
PetscFunctionReturn(PETSC_SUCCESS);
}
int main(int argc, char **argv)
{
SNES snes;
DM dm;
Vec u;
AppCtx user;
PetscFunctionBeginUser;
PetscCall(PetscInitialize(&argc, &argv, NULL, help));
PetscCall(ProcessOptions(PETSC_COMM_WORLD, &user));
PetscCall(CreateMesh(PETSC_COMM_WORLD, &user, &dm));
PetscCall(SNESCreate(PetscObjectComm((PetscObject)dm), &snes));
PetscCall(SNESSetDM(snes, dm));
PetscCall(DMSetApplicationContext(dm, &user));
PetscCall(SetupParameters(PETSC_COMM_WORLD, &user));
PetscCall(SetupProblem(dm, SetupEqn, &user));
PetscCall(DMPlexCreateClosureIndex(dm, NULL));
PetscCall(DMCreateGlobalVector(dm, &u));
PetscCall(DMPlexSetSNESLocalFEM(dm, PETSC_FALSE, &user));
PetscCall(SNESSetFromOptions(snes));
PetscCall(DMSNESCheckFromOptions(snes, u));
PetscCall(PetscObjectSetName((PetscObject)u, "Solution"));
{
Mat J;
MatNullSpace sp;
PetscCall(SNESSetUp(snes));
PetscCall(CreatePressureNullSpace(dm, 1, 1, &sp));
PetscCall(SNESGetJacobian(snes, &J, NULL, NULL, NULL));
PetscCall(MatSetNullSpace(J, sp));
PetscCall(MatNullSpaceDestroy(&sp));
PetscCall(PetscObjectSetName((PetscObject)J, "Jacobian"));
PetscCall(MatViewFromOptions(J, NULL, "-J_view"));
}
PetscCall(SNESSolve(snes, NULL, u));
PetscCall(VecDestroy(&u));
PetscCall(SNESDestroy(&snes));
PetscCall(DMDestroy(&dm));
PetscCall(PetscBagDestroy(&user.bag));
PetscCall(PetscFinalize());
return 0;
}
static PetscErrorCode quadratic_p(PetscInt dim, PetscReal time, const PetscReal x[], PetscInt Nc, PetscScalar *u, PetscCtx ctx)
{
PetscInt d;
u[0] = -0.5 * dim;
for (d = 0; d < dim; ++d) u[0] += x[d];
return PETSC_SUCCESS;
}
static void f0_quadratic_u(PetscInt dim, PetscInt Nf, PetscInt NfAux, const PetscInt uOff[], const PetscInt uOff_x[], const PetscScalar u[], const PetscScalar u_t[], const PetscScalar u_x[], const PetscInt aOff[], const PetscInt aOff_x[], const PetscScalar a[], const PetscScalar a_t[], const PetscScalar a_x[], PetscReal t, const PetscReal x[], PetscInt numConstants, const PetscScalar constants[], PetscScalar f0[])
{
const PetscReal mu = PetscRealPart(constants[0]);
PetscInt d;
f0[0] = (dim - 1) * 4.0 * mu - 1.0;
for (d = 1; d < dim; ++d) f0[d] = 4.0 * mu - 1.0;
}
/* Trigonometric MMS Solution
2D:
u = sin(pi x) + sin(pi y)
v = -pi cos(pi x) y
p = sin(2 pi x) + sin(2 pi y)
f = <2pi cos(2 pi x) + mu pi^2 sin(pi x) + mu pi^2 sin(pi y), 2pi cos(2 pi y) - mu pi^3 cos(pi x) y>
so that
e(u) = (grad u + grad u^T) = / 2pi cos(pi x) pi cos(pi y) + pi^2 sin(pi x) y \
\ pi cos(pi y) + pi^2 sin(pi x) y -2pi cos(pi x) /
div mu e(u) - \nabla p + f = mu <-pi^2 sin(pi x) - pi^2 sin(pi y), pi^3 cos(pi x) y> - <2pi cos(2 pi x), 2pi cos(2 pi y)> + <f_x, f_y> = 0
\nabla \cdot u = pi cos(pi x) - pi cos(pi x) = 0
3D:
u = 2 sin(pi x) + sin(pi y) + sin(pi z)
v = -pi cos(pi x) y
w = -pi cos(pi x) z
p = sin(2 pi x) + sin(2 pi y) + sin(2 pi z)
f = <2pi cos(2 pi x) + mu 2pi^2 sin(pi x) + mu pi^2 sin(pi y) + mu pi^2 sin(pi z), 2pi cos(2 pi y) - mu pi^3 cos(pi x) y, 2pi cos(2 pi z) - mu pi^3 cos(pi x) z>
so that
e(u) = (grad u + grad u^T) = / 4pi cos(pi x) pi cos(pi y) + pi^2 sin(pi x) y pi cos(pi z) + pi^2 sin(pi x) z \
| pi cos(pi y) + pi^2 sin(pi x) y -2pi cos(pi x) 0 |
\ pi cos(pi z) + pi^2 sin(pi x) z 0 -2pi cos(pi x) /
div mu e(u) - \nabla p + f = mu <-2pi^2 sin(pi x) - pi^2 sin(pi y) - pi^2 sin(pi z), pi^3 cos(pi x) y, pi^3 cos(pi x) z> - <2pi cos(2 pi x), 2pi cos(2 pi y), 2pi cos(2 pi z)> + <f_x, f_y, f_z> = 0
\nabla \cdot u = 2 pi cos(pi x) - pi cos(pi x) - pi cos(pi x) = 0
*/
static PetscErrorCode trig_u(PetscInt dim, PetscReal time, const PetscReal x[], PetscInt Nc, PetscScalar *u, PetscCtx ctx)
{
PetscInt c;
u[0] = (dim - 1) * PetscSinReal(PETSC_PI * x[0]);
for (c = 1; c < Nc; ++c) {
u[0] += PetscSinReal(PETSC_PI * x[c]);
u[c] = -PETSC_PI * PetscCosReal(PETSC_PI * x[0]) * x[c];
}
return PETSC_SUCCESS;
}
static PetscErrorCode trig_p(PetscInt dim, PetscReal time, const PetscReal x[], PetscInt Nc, PetscScalar *u, PetscCtx ctx)
{
PetscInt d;
for (d = 0, u[0] = 0.0; d < dim; ++d) u[0] += PetscSinReal(2.0 * PETSC_PI * x[d]);
return PETSC_SUCCESS;
}
static void f0_trig_u(PetscInt dim, PetscInt Nf, PetscInt NfAux, const PetscInt uOff[], const PetscInt uOff_x[], const PetscScalar u[], const PetscScalar u_t[], const PetscScalar u_x[], const PetscInt aOff[], const PetscInt aOff_x[], const PetscScalar a[], const PetscScalar a_t[], const PetscScalar a_x[], PetscReal t, const PetscReal x[], PetscInt numConstants, const PetscScalar constants[], PetscScalar f0[])
{
const PetscReal mu = PetscRealPart(constants[0]);
PetscInt d;
f0[0] = -2.0 * PETSC_PI * PetscCosReal(2.0 * PETSC_PI * x[0]) - (dim - 1) * mu * PetscSqr(PETSC_PI) * PetscSinReal(PETSC_PI * x[0]);
for (d = 1; d < dim; ++d) {
f0[0] -= mu * PetscSqr(PETSC_PI) * PetscSinReal(PETSC_PI * x[d]);
f0[d] = -2.0 * PETSC_PI * PetscCosReal(2.0 * PETSC_PI * x[d]) + mu * PetscPowRealInt(PETSC_PI, 3) * PetscCosReal(PETSC_PI * x[0]) * x[d];
}
}
/* Inline helpers for computing exact velocity in void boundary kernels */
static inline void ExactVelocityQuadratic(PetscInt dim, const PetscReal x[], PetscScalar g[])
{
PetscInt c;
g[0] = (dim - 1) * x[0] * x[0];
for (c = 1; c < dim; ++c) {
g[0] += x[c] * x[c];
g[c] = 2.0 * x[0] * x[0] - 2.0 * x[0] * x[c];
}
}
static inline void ExactVelocityTrig(PetscInt dim, const PetscReal x[], PetscScalar g[])
{
PetscInt c;
g[0] = (dim - 1) * PetscSinReal(PETSC_PI * x[0]);
for (c = 1; c < dim; ++c) {
g[0] += PetscSinReal(PETSC_PI * x[c]);
g[c] = -PETSC_PI * PetscCosReal(PETSC_PI * x[0]) * x[c];
}
}
/* Nitsche boundary residual kernels for velocity (field 0)
f0_bd_u[c] = -mu * sum_d (u_x[c*dim+d] + u_x[d*dim+c]) * n[d] (consistency: stress flux from IBP)
+ p * n[c] (pressure flux from IBP)
+ penalty * (u[c] - g[c]) (penalty) */
static void f0_bd_nitsche_quadratic_u(PetscInt dim, PetscInt Nf, PetscInt NfAux, const PetscInt uOff[], const PetscInt uOff_x[], const PetscScalar u[], const PetscScalar u_t[], const PetscScalar u_x[], const PetscInt aOff[], const PetscInt aOff_x[], const PetscScalar a[], const PetscScalar a_t[], const PetscScalar a_x[], PetscReal t, const PetscReal x[], const PetscReal n[], PetscInt numConstants, const PetscScalar constants[], PetscScalar f0[])
{
const PetscReal mu = PetscRealPart(constants[0]);
const PetscReal penalty = PetscRealPart(constants[1]);
PetscScalar g[3];
PetscInt c, d;
ExactVelocityQuadratic(dim, x, g);
for (c = 0; c < dim; ++c) {
f0[c] = penalty * (u[c] - g[c]) + u[uOff[1]] * n[c];
for (d = 0; d < dim; ++d) f0[c] -= mu * (u_x[c * dim + d] + u_x[d * dim + c]) * n[d];
}
}
static void f0_bd_nitsche_trig_u(PetscInt dim, PetscInt Nf, PetscInt NfAux, const PetscInt uOff[], const PetscInt uOff_x[], const PetscScalar u[], const PetscScalar u_t[], const PetscScalar u_x[], const PetscInt aOff[], const PetscInt aOff_x[], const PetscScalar a[], const PetscScalar a_t[], const PetscScalar a_x[], PetscReal t, const PetscReal x[], const PetscReal n[], PetscInt numConstants, const PetscScalar constants[], PetscScalar f0[])
{
const PetscReal mu = PetscRealPart(constants[0]);
const PetscReal penalty = PetscRealPart(constants[1]);
PetscScalar g[3];
PetscInt c, d;
ExactVelocityTrig(dim, x, g);
for (c = 0; c < dim; ++c) {
f0[c] = penalty * (u[c] - g[c]) + u[uOff[1]] * n[c];
for (d = 0; d < dim; ++d) f0[c] -= mu * (u_x[c * dim + d] + u_x[d * dim + c]) * n[d];
}
}
/* f1_bd_u[c*dim+d] = -mu * (n[d]*(u[c]-g[c]) + n[c]*(u[d]-g[d])) (symmetry / adjoint consistency) */
static void f1_bd_nitsche_quadratic_u(PetscInt dim, PetscInt Nf, PetscInt NfAux, const PetscInt uOff[], const PetscInt uOff_x[], const PetscScalar u[], const PetscScalar u_t[], const PetscScalar u_x[], const PetscInt aOff[], const PetscInt aOff_x[], const PetscScalar a[], const PetscScalar a_t[], const PetscScalar a_x[], PetscReal t, const PetscReal x[], const PetscReal n[], PetscInt numConstants, const PetscScalar constants[], PetscScalar f1[])
{
const PetscReal mu = PetscRealPart(constants[0]);
PetscScalar g[3];
PetscInt c, d;
ExactVelocityQuadratic(dim, x, g);
for (c = 0; c < dim; ++c)
for (d = 0; d < dim; ++d) f1[c * dim + d] = -mu * (n[d] * (u[c] - g[c]) + n[c] * (u[d] - g[d]));
}
static void f1_bd_nitsche_trig_u(PetscInt dim, PetscInt Nf, PetscInt NfAux, const PetscInt uOff[], const PetscInt uOff_x[], const PetscScalar u[], const PetscScalar u_t[], const PetscScalar u_x[], const PetscInt aOff[], const PetscInt aOff_x[], const PetscScalar a[], const PetscScalar a_t[], const PetscScalar a_x[], PetscReal t, const PetscReal x[], const PetscReal n[], PetscInt numConstants, const PetscScalar constants[], PetscScalar f1[])
{
const PetscReal mu = PetscRealPart(constants[0]);
PetscScalar g[3];
PetscInt c, d;
ExactVelocityTrig(dim, x, g);
for (c = 0; c < dim; ++c)
for (d = 0; d < dim; ++d) f1[c * dim + d] = -mu * (n[d] * (u[c] - g[c]) + n[c] * (u[d] - g[d]));
}
/* Nitsche boundary residual kernels for pressure (field 1)
f0_bd_p = sum_d n[d] * (u[d] - g[d]) (continuity equation boundary correction) */
static void f0_bd_nitsche_quadratic_p(PetscInt dim, PetscInt Nf, PetscInt NfAux, const PetscInt uOff[], const PetscInt uOff_x[], const PetscScalar u[], const PetscScalar u_t[], const PetscScalar u_x[], const PetscInt aOff[], const PetscInt aOff_x[], const PetscScalar a[], const PetscScalar a_t[], const PetscScalar a_x[], PetscReal t, const PetscReal x[], const PetscReal n[], PetscInt numConstants, const PetscScalar constants[], PetscScalar f0[])
{
PetscScalar g[3];
PetscInt d;
ExactVelocityQuadratic(dim, x, g);
f0[0] = 0.0;
for (d = 0; d < dim; ++d) f0[0] += n[d] * (u[d] - g[d]);
}
static void f0_bd_nitsche_trig_p(PetscInt dim, PetscInt Nf, PetscInt NfAux, const PetscInt uOff[], const PetscInt uOff_x[], const PetscScalar u[], const PetscScalar u_t[], const PetscScalar u_x[], const PetscInt aOff[], const PetscInt aOff_x[], const PetscScalar a[], const PetscScalar a_t[], const PetscScalar a_x[], PetscReal t, const PetscReal x[], const PetscReal n[], PetscInt numConstants, const PetscScalar constants[], PetscScalar f0[])
{
PetscScalar g[3];
PetscInt d;
ExactVelocityTrig(dim, x, g);
f0[0] = 0.0;
for (d = 0; d < dim; ++d) f0[0] += n[d] * (u[d] - g[d]);
}
/* Nitsche boundary Jacobian kernels (solution-independent)
g0_bd_uu[c*Nc+d] = delta(c,d) * penalty (penalty Jacobian) */
static void g0_bd_uu(PetscInt dim, PetscInt Nf, PetscInt NfAux, const PetscInt uOff[], const PetscInt uOff_x[], const PetscScalar u[], const PetscScalar u_t[], const PetscScalar u_x[], const PetscInt aOff[], const PetscInt aOff_x[], const PetscScalar a[], const PetscScalar a_t[], const PetscScalar a_x[], PetscReal t, PetscReal u_tShift, const PetscReal x[], const PetscReal n[], PetscInt numConstants, const PetscScalar constants[], PetscScalar g0[])
{
const PetscReal penalty = PetscRealPart(constants[1]);
const PetscInt Nc = uOff[1] - uOff[0];
PetscInt c;
for (c = 0; c < Nc; ++c) g0[c * Nc + c] = penalty;
}
/* g1_bd_uu[(c*Nc+d)*dim+e] = -mu * (delta(c,d)*n[e] + delta(c,e)*n[d]) (consistency Jacobian: df0/du_x) */
static void g1_bd_uu(PetscInt dim, PetscInt Nf, PetscInt NfAux, const PetscInt uOff[], const PetscInt uOff_x[], const PetscScalar u[], const PetscScalar u_t[], const PetscScalar u_x[], const PetscInt aOff[], const PetscInt aOff_x[], const PetscScalar a[], const PetscScalar a_t[], const PetscScalar a_x[], PetscReal t, PetscReal u_tShift, const PetscReal x[], const PetscReal n[], PetscInt numConstants, const PetscScalar constants[], PetscScalar g1[])
{
const PetscReal mu = PetscRealPart(constants[0]);
const PetscInt Nc = uOff[1] - uOff[0];
PetscInt c, d, e;
for (c = 0; c < Nc; ++c)
for (d = 0; d < Nc; ++d)
for (e = 0; e < dim; ++e) g1[(c * Nc + d) * dim + e] = -mu * ((c == d ? 1.0 : 0.0) * n[e] + (c == e ? 1.0 : 0.0) * n[d]);
}
/* g2_bd_uu[(c*Nc+d)*dim+e] = -mu * (n[e]*delta(c,d) + n[c]*delta(e,d)) (symmetry Jacobian: df1/du) */
static void g2_bd_uu(PetscInt dim, PetscInt Nf, PetscInt NfAux, const PetscInt uOff[], const PetscInt uOff_x[], const PetscScalar u[], const PetscScalar u_t[], const PetscScalar u_x[], const PetscInt aOff[], const PetscInt aOff_x[], const PetscScalar a[], const PetscScalar a_t[], const PetscScalar a_x[], PetscReal t, PetscReal u_tShift, const PetscReal x[], const PetscReal n[], PetscInt numConstants, const PetscScalar constants[], PetscScalar g2[])
{
const PetscReal mu = PetscRealPart(constants[0]);
const PetscInt Nc = uOff[1] - uOff[0];
PetscInt c, d, e;
for (c = 0; c < Nc; ++c)
for (d = 0; d < Nc; ++d)
for (e = 0; e < dim; ++e) g2[(c * Nc + d) * dim + e] = -mu * (n[e] * (c == d ? 1.0 : 0.0) + n[c] * (e == d ? 1.0 : 0.0));
}
/* g0_bd_up[c*1+0] = n[c] (velocity-pressure coupling: df0_u/dp) */
static void g0_bd_up(PetscInt dim, PetscInt Nf, PetscInt NfAux, const PetscInt uOff[], const PetscInt uOff_x[], const PetscScalar u[], const PetscScalar u_t[], const PetscScalar u_x[], const PetscInt aOff[], const PetscInt aOff_x[], const PetscScalar a[], const PetscScalar a_t[], const PetscScalar a_x[], PetscReal t, PetscReal u_tShift, const PetscReal x[], const PetscReal n[], PetscInt numConstants, const PetscScalar constants[], PetscScalar g0[])
{
PetscInt c;
for (c = 0; c < dim; ++c) g0[c] = n[c];
}
/* g0_bd_pu[0*Nc+d] = n[d] (pressure-velocity coupling: df0_p/du) */
static void g0_bd_pu(PetscInt dim, PetscInt Nf, PetscInt NfAux, const PetscInt uOff[], const PetscInt uOff_x[], const PetscScalar u[], const PetscScalar u_t[], const PetscScalar u_x[], const PetscInt aOff[], const PetscInt aOff_x[], const PetscScalar a[], const PetscScalar a_t[], const PetscScalar a_x[], PetscReal t, PetscReal u_tShift, const PetscReal x[], const PetscReal n[], PetscInt numConstants, const PetscScalar constants[], PetscScalar g0[])
{
PetscInt d;
for (d = 0; d < dim; ++d) g0[d] = n[d];
}
static PetscErrorCode ProcessOptions(MPI_Comm comm, AppCtx *options)
{
PetscInt sol, bc;
PetscFunctionBeginUser;
options->sol = SOL_QUADRATIC;
options->bc = BC_ESSENTIAL;
PetscOptionsBegin(comm, "", "Stokes Problem Options", "DMPLEX");
sol = options->sol;
PetscCall(PetscOptionsEList("-sol", "The MMS solution", "ex62.c", SolTypes, PETSC_STATIC_ARRAY_LENGTH(SolTypes) - 3, SolTypes[options->sol], &sol, NULL));
options->sol = (SolType)sol;
bc = options->bc;
PetscCall(PetscOptionsEList("-bc", "The boundary condition type", "ex62.c", BCTypes, PETSC_STATIC_ARRAY_LENGTH(BCTypes) - 3, BCTypes[options->bc], &bc, NULL));
options->bc = (BCType)bc;
PetscOptionsEnd();
PetscFunctionReturn(PETSC_SUCCESS);
}
static PetscErrorCode CreateMesh(MPI_Comm comm, AppCtx *user, DM *dm)
{
PetscFunctionBeginUser;
PetscCall(DMCreate(comm, dm));
PetscCall(DMSetType(*dm, DMPLEX));
PetscCall(DMSetFromOptions(*dm));
PetscCall(DMViewFromOptions(*dm, NULL, "-dm_view"));
PetscFunctionReturn(PETSC_SUCCESS);
}
static PetscErrorCode SetupParameters(MPI_Comm comm, AppCtx *ctx)
{
Parameter *p;
PetscFunctionBeginUser;
/* setup PETSc parameter bag */
PetscCall(PetscBagCreate(PETSC_COMM_SELF, sizeof(Parameter), &ctx->bag));
PetscCall(PetscBagGetData(ctx->bag, &p));
PetscCall(PetscBagSetName(ctx->bag, "par", "Stokes Parameters"));
PetscCall(PetscBagRegisterScalar(ctx->bag, &p->mu, 1.0, "mu", "Dynamic Shear Viscosity, Pa s"));
PetscCall(PetscBagRegisterScalar(ctx->bag, &p->eta, 100.0, "eta", "Nitsche penalty parameter (dimensionless)"));
PetscCall(PetscBagSetFromOptions(ctx->bag));
{
PetscViewer viewer;
PetscViewerFormat format;
PetscBool flg;
PetscCall(PetscOptionsCreateViewer(comm, NULL, NULL, "-param_view", &viewer, &format, &flg));
if (flg) {
PetscCall(PetscViewerPushFormat(viewer, format));
PetscCall(PetscBagView(ctx->bag, viewer));
PetscCall(PetscViewerFlush(viewer));
PetscCall(PetscViewerPopFormat(viewer));
PetscCall(PetscViewerDestroy(&viewer));
}
}
PetscFunctionReturn(PETSC_SUCCESS);
}
static PetscErrorCode SetupEqn(DM dm, AppCtx *user)
{
PetscErrorCode (*exactFuncs[2])(PetscInt, PetscReal, const PetscReal[], PetscInt, PetscScalar *, void *);
void (*f0_bd_u)(PetscInt, PetscInt, PetscInt, const PetscInt[], const PetscInt[], const PetscScalar[], const PetscScalar[], const PetscScalar[], const PetscInt[], const PetscInt[], const PetscScalar[], const PetscScalar[], const PetscScalar[], PetscReal, const PetscReal[], const PetscReal[], PetscInt, const PetscScalar[], PetscScalar[]);
void (*f1_bd_u)(PetscInt, PetscInt, PetscInt, const PetscInt[], const PetscInt[], const PetscScalar[], const PetscScalar[], const PetscScalar[], const PetscInt[], const PetscInt[], const PetscScalar[], const PetscScalar[], const PetscScalar[], PetscReal, const PetscReal[], const PetscReal[], PetscInt, const PetscScalar[], PetscScalar[]);
void (*f0_bd_p)(PetscInt, PetscInt, PetscInt, const PetscInt[], const PetscInt[], const PetscScalar[], const PetscScalar[], const PetscScalar[], const PetscInt[], const PetscInt[], const PetscScalar[], const PetscScalar[], const PetscScalar[], PetscReal, const PetscReal[], const PetscReal[], PetscInt, const PetscScalar[], PetscScalar[]);
PetscDS ds;
DMLabel label;
const PetscInt id = 1;
PetscFunctionBeginUser;
PetscCall(DMGetDS(dm, &ds));
switch (user->sol) {
case SOL_QUADRATIC:
PetscCall(PetscDSSetResidual(ds, 0, f0_quadratic_u, f1_u));
exactFuncs[0] = quadratic_u;
exactFuncs[1] = quadratic_p;
f0_bd_u = f0_bd_nitsche_quadratic_u;
f1_bd_u = f1_bd_nitsche_quadratic_u;
f0_bd_p = f0_bd_nitsche_quadratic_p;
break;
case SOL_TRIG:
PetscCall(PetscDSSetResidual(ds, 0, f0_trig_u, f1_u));
exactFuncs[0] = trig_u;
exactFuncs[1] = trig_p;
f0_bd_u = f0_bd_nitsche_trig_u;
f1_bd_u = f1_bd_nitsche_trig_u;
f0_bd_p = f0_bd_nitsche_trig_p;
break;
default:
SETERRQ(PetscObjectComm((PetscObject)dm), PETSC_ERR_ARG_WRONG, "Unsupported solution type: %s (%d)", SolTypes[PetscMin(user->sol, SOL_UNKNOWN)], user->sol);
}
PetscCall(PetscDSSetResidual(ds, 1, f0_p, NULL));
PetscCall(PetscDSSetJacobian(ds, 0, 0, NULL, NULL, NULL, g3_uu));
PetscCall(PetscDSSetJacobian(ds, 0, 1, NULL, NULL, g2_up, NULL));
PetscCall(PetscDSSetJacobian(ds, 1, 0, NULL, g1_pu, NULL, NULL));
PetscCall(PetscDSSetJacobianPreconditioner(ds, 0, 0, NULL, NULL, NULL, g3_uu));
PetscCall(PetscDSSetJacobianPreconditioner(ds, 1, 1, g0_pp, NULL, NULL, NULL));
PetscCall(PetscDSSetExactSolution(ds, 0, exactFuncs[0], user));
PetscCall(PetscDSSetExactSolution(ds, 1, exactFuncs[1], user));
PetscCall(DMGetLabel(dm, "marker", &label));
switch (user->bc) {
case BC_ESSENTIAL:
PetscCall(DMAddBoundary(dm, DM_BC_ESSENTIAL, "wall", label, 1, &id, 0, 0, NULL, (PetscVoidFn *)exactFuncs[0], NULL, user, NULL));
break;
case BC_NITSCHE: {
PetscWeakForm wf;
DMLabel faceSetsLabel;
IS valueIS;
const PetscInt *faceSetValues;
PetscInt numValues, bd, i;
PetscCall(DMGetLabel(dm, "Face Sets", &faceSetsLabel));
PetscCall(DMLabelGetNumValues(faceSetsLabel, &numValues));
PetscCall(DMLabelGetValueIS(faceSetsLabel, &valueIS));
PetscCall(ISGetIndices(valueIS, &faceSetValues));
/* Velocity boundary: natural BC with Nitsche terms on all boundary faces */
PetscCall(DMAddBoundary(dm, DM_BC_NATURAL, "wall", faceSetsLabel, numValues, faceSetValues, 0, 0, NULL, NULL, NULL, user, &bd));
PetscCall(PetscDSGetBoundary(ds, bd, &wf, NULL, NULL, NULL, NULL, NULL, NULL, NULL, NULL, NULL, NULL, NULL));
for (i = 0; i < numValues; ++i) {
/* Velocity residual (field 0): f0 and f1 */
PetscCall(PetscWeakFormSetIndexBdResidual(wf, faceSetsLabel, faceSetValues[i], 0, 0, 0, f0_bd_u, 0, f1_bd_u));
/* Velocity-velocity Jacobian (field 0, field 0): g0 (penalty), g1 (consistency), g2 (symmetry) */
PetscCall(PetscWeakFormSetIndexBdJacobian(wf, faceSetsLabel, faceSetValues[i], 0, 0, 0, 0, g0_bd_uu, 0, g1_bd_uu, 0, g2_bd_uu, 0, NULL));
/* Velocity-pressure Jacobian (field 0, field 1): g0 (pressure coupling) */
PetscCall(PetscWeakFormSetIndexBdJacobian(wf, faceSetsLabel, faceSetValues[i], 0, 1, 0, 0, g0_bd_up, 0, NULL, 0, NULL, 0, NULL));
}
/* Pressure boundary: natural BC for continuity equation correction */
PetscCall(DMAddBoundary(dm, DM_BC_NATURAL, "wall_pres", faceSetsLabel, numValues, faceSetValues, 1, 0, NULL, NULL, NULL, user, &bd));
PetscCall(PetscDSGetBoundary(ds, bd, &wf, NULL, NULL, NULL, NULL, NULL, NULL, NULL, NULL, NULL, NULL, NULL));
for (i = 0; i < numValues; ++i) {
/* Pressure residual (field 1): f0 */
PetscCall(PetscWeakFormSetIndexBdResidual(wf, faceSetsLabel, faceSetValues[i], 1, 0, 0, f0_bd_p, 0, NULL));
/* Pressure-velocity Jacobian (field 1, field 0): g0 */
PetscCall(PetscWeakFormSetIndexBdJacobian(wf, faceSetsLabel, faceSetValues[i], 1, 0, 0, 0, g0_bd_pu, 0, NULL, 0, NULL, 0, NULL));
}
PetscCall(ISRestoreIndices(valueIS, &faceSetValues));
PetscCall(ISDestroy(&valueIS));
} break;
default:
SETERRQ(PetscObjectComm((PetscObject)dm), PETSC_ERR_ARG_WRONG, "Unsupported BC type: %s (%d)", BCTypes[PetscMin(user->bc, BC_UNKNOWN)], user->bc);
}
/* Make constant values available to pointwise functions */
{
Parameter *param;
PetscScalar constants[2];
PetscCall(PetscBagGetData(user->bag, ¶m));
constants[0] = param->mu; /* dynamic shear viscosity, Pa s */
constants[1] = 0.0; /* Nitsche penalty (set below if needed) */
if (user->bc == BC_NITSCHE) {
/* Compute cell size h from mesh */
PetscInt dim, cStart;
PetscReal vol, h;
PetscCall(DMGetDimension(dm, &dim));
PetscCall(DMPlexGetHeightStratum(dm, 0, &cStart, NULL));
PetscCall(DMPlexComputeCellGeometryFVM(dm, cStart, &vol, NULL, NULL));
h = PetscPowReal(vol, 1.0 / dim);
constants[1] = PetscRealPart(param->eta) * PetscRealPart(param->mu) / h;
}
PetscCall(PetscDSSetConstants(ds, 2, constants));
}
PetscFunctionReturn(PETSC_SUCCESS);
}
static PetscErrorCode zero(PetscInt dim, PetscReal time, const PetscReal x[], PetscInt Nc, PetscScalar *u, PetscCtx ctx)
{
PetscInt c;
for (c = 0; c < Nc; ++c) u[c] = 0.0;
return PETSC_SUCCESS;
}
static PetscErrorCode one(PetscInt dim, PetscReal time, const PetscReal x[], PetscInt Nc, PetscScalar *u, PetscCtx ctx)
{
PetscInt c;
for (c = 0; c < Nc; ++c) u[c] = 1.0;
return PETSC_SUCCESS;
}
static PetscErrorCode CreatePressureNullSpace(DM dm, PetscInt origField, PetscInt field, MatNullSpace *nullspace)
{
Vec vec;
PetscErrorCode (*funcs[2])(PetscInt dim, PetscReal time, const PetscReal x[], PetscInt Nf, PetscScalar *u, PetscCtx ctx) = {zero, one};
PetscFunctionBeginUser;
PetscCheck(origField == 1, PetscObjectComm((PetscObject)dm), PETSC_ERR_ARG_WRONG, "Field %" PetscInt_FMT " should be 1 for pressure", origField);
funcs[field] = one;
{
PetscDS ds;
PetscCall(DMGetDS(dm, &ds));
PetscCall(PetscObjectViewFromOptions((PetscObject)ds, NULL, "-ds_view"));
}
PetscCall(DMCreateGlobalVector(dm, &vec));
PetscCall(DMProjectFunction(dm, 0.0, funcs, NULL, INSERT_ALL_VALUES, vec));
PetscCall(VecNormalize(vec, NULL));
PetscCall(MatNullSpaceCreate(PetscObjectComm((PetscObject)dm), PETSC_FALSE, 1, &vec, nullspace));
PetscCall(VecDestroy(&vec));
/* New style for field null spaces */
{
PetscObject pressure;
MatNullSpace nullspacePres;
PetscCall(DMGetField(dm, field, NULL, &pressure));
PetscCall(MatNullSpaceCreate(PetscObjectComm(pressure), PETSC_TRUE, 0, NULL, &nullspacePres));
PetscCall(PetscObjectCompose(pressure, "nullspace", (PetscObject)nullspacePres));
PetscCall(MatNullSpaceDestroy(&nullspacePres));
}
PetscFunctionReturn(PETSC_SUCCESS);
}
static PetscErrorCode SetupProblem(DM dm, PetscErrorCode (*setupEqn)(DM, AppCtx *), AppCtx *user)
{
DM cdm = dm;
PetscQuadrature q = NULL;
PetscBool simplex;
PetscInt dim, Nf = 2, f, Nc[2];
const char *name[2] = {"velocity", "pressure"};
const char *prefix[2] = {"vel_", "pres_"};
PetscFunctionBegin;
PetscCall(DMGetDimension(dm, &dim));
PetscCall(DMPlexIsSimplex(dm, &simplex));
Nc[0] = dim;
Nc[1] = 1;
for (f = 0; f < Nf; ++f) {
PetscFE fe;
PetscCall(PetscFECreateDefault(PETSC_COMM_SELF, dim, Nc[f], simplex, prefix[f], -1, &fe));
PetscCall(PetscObjectSetName((PetscObject)fe, name[f]));
if (!q) PetscCall(PetscFEGetQuadrature(fe, &q));
PetscCall(PetscFESetQuadrature(fe, q));
PetscCall(DMSetField(dm, f, NULL, (PetscObject)fe));
PetscCall(PetscFEDestroy(&fe));
}
PetscCall(DMCreateDS(dm));
PetscCall((*setupEqn)(dm, user));
while (cdm) {
PetscCall(DMCopyDisc(dm, cdm));
PetscCall(DMSetNullSpaceConstructor(cdm, 1, CreatePressureNullSpace));
PetscCall(DMGetCoarseDM(cdm, &cdm));
}
PetscFunctionReturn(PETSC_SUCCESS);
}
int main(int argc, char **argv)
{
SNES snes;
DM dm;
Vec u;
AppCtx user;
PetscFunctionBeginUser;
PetscCall(PetscInitialize(&argc, &argv, NULL, help));
PetscCall(ProcessOptions(PETSC_COMM_WORLD, &user));
PetscCall(CreateMesh(PETSC_COMM_WORLD, &user, &dm));
PetscCall(SNESCreate(PetscObjectComm((PetscObject)dm), &snes));
PetscCall(SNESSetDM(snes, dm));
PetscCall(DMSetApplicationContext(dm, &user));
PetscCall(SetupParameters(PETSC_COMM_WORLD, &user));
PetscCall(SetupProblem(dm, SetupEqn, &user));
PetscCall(DMPlexCreateClosureIndex(dm, NULL));
PetscCall(DMCreateGlobalVector(dm, &u));
PetscCall(DMPlexSetSNESLocalFEM(dm, PETSC_FALSE, &user));
PetscCall(SNESSetFromOptions(snes));
PetscCall(DMSNESCheckFromOptions(snes, u));
PetscCall(PetscObjectSetName((PetscObject)u, "Solution"));
{
Mat J;
MatNullSpace sp;
PetscCall(SNESSetUp(snes));
PetscCall(CreatePressureNullSpace(dm, 1, 1, &sp));
PetscCall(SNESGetJacobian(snes, &J, NULL, NULL, NULL));
PetscCall(MatSetNullSpace(J, sp));
PetscCall(MatNullSpaceDestroy(&sp));
PetscCall(PetscObjectSetName((PetscObject)J, "Jacobian"));
PetscCall(MatViewFromOptions(J, NULL, "-J_view"));
}
PetscCall(SNESSolve(snes, NULL, u));
PetscCall(VecDestroy(&u));
PetscCall(SNESDestroy(&snes));
PetscCall(DMDestroy(&dm));
PetscCall(PetscBagDestroy(&user.bag));
PetscCall(PetscFinalize());
return 0;
}
By plugging these solutions into our equations, assuming that the velocity we choose is divergence-free, we can determine the body force necessary to make them satisfy the Stokes equations. For the quadratic solution above, we find
which is implemented in our f0_quadratic_u pointwise function
static void f0_quadratic_u(PetscInt dim, PetscInt Nf, PetscInt NfAux, const PetscInt uOff[], const PetscInt uOff_x[], const PetscScalar u[], const PetscScalar u_t[], const PetscScalar u_x[], const PetscInt aOff[], const PetscInt aOff_x[], const PetscScalar a[], const PetscScalar a_t[], const PetscScalar a_x[], PetscReal t, const PetscReal x[], PetscInt numConstants, const PetscScalar constants[], PetscScalar f0[])
{
const PetscReal mu = PetscRealPart(constants[0]);
PetscInt d;
f0[0] = (dim - 1) * 4.0 * mu - 1.0;
for (d = 1; d < dim; ++d) f0[d] = 4.0 * mu - 1.0;
}
We let PETSc know about these solutions
PetscCall(PetscDSSetExactSolution(ds, 0, exactFuncs[0], user));
PetscCall(PetscDSSetExactSolution(ds, 1, exactFuncs[1], user));
These solutions will be captured exactly by the \(P_2-P_1\) finite element space. We can use the -dmsnes_check option to activate function space checks. It gives the \(L_2\) error, or discretization error, of the exact solution, the residual computed using the interpolation of the exact solution into our finite element space, and uses a Taylor test to check that our Jacobian matches the residual. It should converge at order 2, or be exact in the case of linear equations like Stokes. Our \(P_2-P_1\) runs in the PETSc test section at the bottom of the source file
suffix: 2d_p2_p1_check
requires: triangle
args: -sol quadratic -vel_petscspace_degree 2 -pres_petscspace_degree 1 -dmsnes_check 0.0001
suffix: 3d_p2_p1_check
requires: ctetgen
args: -sol quadratic -dm_plex_dim 3 -dm_plex_box_faces 2,2,2 -vel_petscspace_degree 2 -pres_petscspace_degree 1 -dmsnes_check 0.0001
verify these claims, as we can see from the output files
L_2 Error: [2.08577e-16, 3.51044e-17]
L_2 Residual: 3.30808e-15
Function appears to be linear
L_2 Error: [8.33588e-16, 9.09348e-17]
L_2 Residual: 2.40406e-15
Function appears to be linear
We can carry out the same tests for the \(Q_2-Q_1\) element,
suffix: 2d_q2_q1_check
args: -sol quadratic -dm_plex_simplex 0 -vel_petscspace_degree 2 -pres_petscspace_degree 1 -dmsnes_check 0.0001
suffix: 3d_q2_q1_check
args: -sol quadratic -dm_plex_simplex 0 -dm_plex_dim 3 -dm_plex_box_faces 2,2,2 -vel_petscspace_degree 2 -pres_petscspace_degree 1 -dmsnes_check 0.0001
The quadratic solution, however, cannot tell us whether our discretization is attaining the correct order of convergence, especially for higher order elements. Thus, we will define another solution based on trigonometric functions.
static PetscErrorCode trig_u(PetscInt dim, PetscReal time, const PetscReal x[], PetscInt Nc, PetscScalar *u, PetscCtx ctx)
{
PetscInt c;
u[0] = (dim - 1) * PetscSinReal(PETSC_PI * x[0]);
for (c = 1; c < Nc; ++c) {
u[0] += PetscSinReal(PETSC_PI * x[c]);
u[c] = -PETSC_PI * PetscCosReal(PETSC_PI * x[0]) * x[c];
}
return PETSC_SUCCESS;
}
static PetscErrorCode trig_p(PetscInt dim, PetscReal time, const PetscReal x[], PetscInt Nc, PetscScalar *u, PetscCtx ctx)
{
PetscInt d;
for (d = 0, u[0] = 0.0; d < dim; ++d) u[0] += PetscSinReal(2.0 * PETSC_PI * x[d]);
return PETSC_SUCCESS;
}
static void f0_trig_u(PetscInt dim, PetscInt Nf, PetscInt NfAux, const PetscInt uOff[], const PetscInt uOff_x[], const PetscScalar u[], const PetscScalar u_t[], const PetscScalar u_x[], const PetscInt aOff[], const PetscInt aOff_x[], const PetscScalar a[], const PetscScalar a_t[], const PetscScalar a_x[], PetscReal t, const PetscReal x[], PetscInt numConstants, const PetscScalar constants[], PetscScalar f0[])
{
const PetscReal mu = PetscRealPart(constants[0]);
PetscInt d;
f0[0] = -2.0 * PETSC_PI * PetscCosReal(2.0 * PETSC_PI * x[0]) - (dim - 1) * mu * PetscSqr(PETSC_PI) * PetscSinReal(PETSC_PI * x[0]);
for (d = 1; d < dim; ++d) {
f0[0] -= mu * PetscSqr(PETSC_PI) * PetscSinReal(PETSC_PI * x[d]);
f0[d] = -2.0 * PETSC_PI * PetscCosReal(2.0 * PETSC_PI * x[d]) + mu * PetscPowRealInt(PETSC_PI, 3) * PetscCosReal(PETSC_PI * x[0]) * x[d];
}
}
/* Inline helpers for computing exact velocity in void boundary kernels */
static inline void ExactVelocityQuadratic(PetscInt dim, const PetscReal x[], PetscScalar g[])
{
PetscInt c;
g[0] = (dim - 1) * x[0] * x[0];
for (c = 1; c < dim; ++c) {
g[0] += x[c] * x[c];
g[c] = 2.0 * x[0] * x[0] - 2.0 * x[0] * x[c];
}
}
static inline void ExactVelocityTrig(PetscInt dim, const PetscReal x[], PetscScalar g[])
{
PetscInt c;
g[0] = (dim - 1) * PetscSinReal(PETSC_PI * x[0]);
for (c = 1; c < dim; ++c) {
g[0] += PetscSinReal(PETSC_PI * x[c]);
g[c] = -PETSC_PI * PetscCosReal(PETSC_PI * x[0]) * x[c];
}
}
/* Nitsche boundary residual kernels for velocity (field 0)
f0_bd_u[c] = -mu * sum_d (u_x[c*dim+d] + u_x[d*dim+c]) * n[d] (consistency: stress flux from IBP)
+ p * n[c] (pressure flux from IBP)
+ penalty * (u[c] - g[c]) (penalty) */
static void f0_bd_nitsche_quadratic_u(PetscInt dim, PetscInt Nf, PetscInt NfAux, const PetscInt uOff[], const PetscInt uOff_x[], const PetscScalar u[], const PetscScalar u_t[], const PetscScalar u_x[], const PetscInt aOff[], const PetscInt aOff_x[], const PetscScalar a[], const PetscScalar a_t[], const PetscScalar a_x[], PetscReal t, const PetscReal x[], const PetscReal n[], PetscInt numConstants, const PetscScalar constants[], PetscScalar f0[])
{
const PetscReal mu = PetscRealPart(constants[0]);
const PetscReal penalty = PetscRealPart(constants[1]);
PetscScalar g[3];
PetscInt c, d;
ExactVelocityQuadratic(dim, x, g);
for (c = 0; c < dim; ++c) {
f0[c] = penalty * (u[c] - g[c]) + u[uOff[1]] * n[c];
for (d = 0; d < dim; ++d) f0[c] -= mu * (u_x[c * dim + d] + u_x[d * dim + c]) * n[d];
}
}
static void f0_bd_nitsche_trig_u(PetscInt dim, PetscInt Nf, PetscInt NfAux, const PetscInt uOff[], const PetscInt uOff_x[], const PetscScalar u[], const PetscScalar u_t[], const PetscScalar u_x[], const PetscInt aOff[], const PetscInt aOff_x[], const PetscScalar a[], const PetscScalar a_t[], const PetscScalar a_x[], PetscReal t, const PetscReal x[], const PetscReal n[], PetscInt numConstants, const PetscScalar constants[], PetscScalar f0[])
{
const PetscReal mu = PetscRealPart(constants[0]);
const PetscReal penalty = PetscRealPart(constants[1]);
PetscScalar g[3];
PetscInt c, d;
ExactVelocityTrig(dim, x, g);
for (c = 0; c < dim; ++c) {
f0[c] = penalty * (u[c] - g[c]) + u[uOff[1]] * n[c];
for (d = 0; d < dim; ++d) f0[c] -= mu * (u_x[c * dim + d] + u_x[d * dim + c]) * n[d];
}
}
/* f1_bd_u[c*dim+d] = -mu * (n[d]*(u[c]-g[c]) + n[c]*(u[d]-g[d])) (symmetry / adjoint consistency) */
static void f1_bd_nitsche_quadratic_u(PetscInt dim, PetscInt Nf, PetscInt NfAux, const PetscInt uOff[], const PetscInt uOff_x[], const PetscScalar u[], const PetscScalar u_t[], const PetscScalar u_x[], const PetscInt aOff[], const PetscInt aOff_x[], const PetscScalar a[], const PetscScalar a_t[], const PetscScalar a_x[], PetscReal t, const PetscReal x[], const PetscReal n[], PetscInt numConstants, const PetscScalar constants[], PetscScalar f1[])
{
const PetscReal mu = PetscRealPart(constants[0]);
PetscScalar g[3];
PetscInt c, d;
ExactVelocityQuadratic(dim, x, g);
for (c = 0; c < dim; ++c)
for (d = 0; d < dim; ++d) f1[c * dim + d] = -mu * (n[d] * (u[c] - g[c]) + n[c] * (u[d] - g[d]));
}
static void f1_bd_nitsche_trig_u(PetscInt dim, PetscInt Nf, PetscInt NfAux, const PetscInt uOff[], const PetscInt uOff_x[], const PetscScalar u[], const PetscScalar u_t[], const PetscScalar u_x[], const PetscInt aOff[], const PetscInt aOff_x[], const PetscScalar a[], const PetscScalar a_t[], const PetscScalar a_x[], PetscReal t, const PetscReal x[], const PetscReal n[], PetscInt numConstants, const PetscScalar constants[], PetscScalar f1[])
{
const PetscReal mu = PetscRealPart(constants[0]);
PetscScalar g[3];
PetscInt c, d;
ExactVelocityTrig(dim, x, g);
for (c = 0; c < dim; ++c)
for (d = 0; d < dim; ++d) f1[c * dim + d] = -mu * (n[d] * (u[c] - g[c]) + n[c] * (u[d] - g[d]));
}
/* Nitsche boundary residual kernels for pressure (field 1)
f0_bd_p = sum_d n[d] * (u[d] - g[d]) (continuity equation boundary correction) */
static void f0_bd_nitsche_quadratic_p(PetscInt dim, PetscInt Nf, PetscInt NfAux, const PetscInt uOff[], const PetscInt uOff_x[], const PetscScalar u[], const PetscScalar u_t[], const PetscScalar u_x[], const PetscInt aOff[], const PetscInt aOff_x[], const PetscScalar a[], const PetscScalar a_t[], const PetscScalar a_x[], PetscReal t, const PetscReal x[], const PetscReal n[], PetscInt numConstants, const PetscScalar constants[], PetscScalar f0[])
{
PetscScalar g[3];
PetscInt d;
ExactVelocityQuadratic(dim, x, g);
f0[0] = 0.0;
for (d = 0; d < dim; ++d) f0[0] += n[d] * (u[d] - g[d]);
}
static void f0_bd_nitsche_trig_p(PetscInt dim, PetscInt Nf, PetscInt NfAux, const PetscInt uOff[], const PetscInt uOff_x[], const PetscScalar u[], const PetscScalar u_t[], const PetscScalar u_x[], const PetscInt aOff[], const PetscInt aOff_x[], const PetscScalar a[], const PetscScalar a_t[], const PetscScalar a_x[], PetscReal t, const PetscReal x[], const PetscReal n[], PetscInt numConstants, const PetscScalar constants[], PetscScalar f0[])
{
PetscScalar g[3];
PetscInt d;
ExactVelocityTrig(dim, x, g);
f0[0] = 0.0;
for (d = 0; d < dim; ++d) f0[0] += n[d] * (u[d] - g[d]);
}
/* Nitsche boundary Jacobian kernels (solution-independent)
g0_bd_uu[c*Nc+d] = delta(c,d) * penalty (penalty Jacobian) */
static void g0_bd_uu(PetscInt dim, PetscInt Nf, PetscInt NfAux, const PetscInt uOff[], const PetscInt uOff_x[], const PetscScalar u[], const PetscScalar u_t[], const PetscScalar u_x[], const PetscInt aOff[], const PetscInt aOff_x[], const PetscScalar a[], const PetscScalar a_t[], const PetscScalar a_x[], PetscReal t, PetscReal u_tShift, const PetscReal x[], const PetscReal n[], PetscInt numConstants, const PetscScalar constants[], PetscScalar g0[])
{
const PetscReal penalty = PetscRealPart(constants[1]);
const PetscInt Nc = uOff[1] - uOff[0];
PetscInt c;
for (c = 0; c < Nc; ++c) g0[c * Nc + c] = penalty;
}
/* g1_bd_uu[(c*Nc+d)*dim+e] = -mu * (delta(c,d)*n[e] + delta(c,e)*n[d]) (consistency Jacobian: df0/du_x) */
static void g1_bd_uu(PetscInt dim, PetscInt Nf, PetscInt NfAux, const PetscInt uOff[], const PetscInt uOff_x[], const PetscScalar u[], const PetscScalar u_t[], const PetscScalar u_x[], const PetscInt aOff[], const PetscInt aOff_x[], const PetscScalar a[], const PetscScalar a_t[], const PetscScalar a_x[], PetscReal t, PetscReal u_tShift, const PetscReal x[], const PetscReal n[], PetscInt numConstants, const PetscScalar constants[], PetscScalar g1[])
{
const PetscReal mu = PetscRealPart(constants[0]);
const PetscInt Nc = uOff[1] - uOff[0];
PetscInt c, d, e;
for (c = 0; c < Nc; ++c)
for (d = 0; d < Nc; ++d)
for (e = 0; e < dim; ++e) g1[(c * Nc + d) * dim + e] = -mu * ((c == d ? 1.0 : 0.0) * n[e] + (c == e ? 1.0 : 0.0) * n[d]);
}
/* g2_bd_uu[(c*Nc+d)*dim+e] = -mu * (n[e]*delta(c,d) + n[c]*delta(e,d)) (symmetry Jacobian: df1/du) */
static void g2_bd_uu(PetscInt dim, PetscInt Nf, PetscInt NfAux, const PetscInt uOff[], const PetscInt uOff_x[], const PetscScalar u[], const PetscScalar u_t[], const PetscScalar u_x[], const PetscInt aOff[], const PetscInt aOff_x[], const PetscScalar a[], const PetscScalar a_t[], const PetscScalar a_x[], PetscReal t, PetscReal u_tShift, const PetscReal x[], const PetscReal n[], PetscInt numConstants, const PetscScalar constants[], PetscScalar g2[])
{
const PetscReal mu = PetscRealPart(constants[0]);
const PetscInt Nc = uOff[1] - uOff[0];
PetscInt c, d, e;
for (c = 0; c < Nc; ++c)
for (d = 0; d < Nc; ++d)
for (e = 0; e < dim; ++e) g2[(c * Nc + d) * dim + e] = -mu * (n[e] * (c == d ? 1.0 : 0.0) + n[c] * (e == d ? 1.0 : 0.0));
}
/* g0_bd_up[c*1+0] = n[c] (velocity-pressure coupling: df0_u/dp) */
static void g0_bd_up(PetscInt dim, PetscInt Nf, PetscInt NfAux, const PetscInt uOff[], const PetscInt uOff_x[], const PetscScalar u[], const PetscScalar u_t[], const PetscScalar u_x[], const PetscInt aOff[], const PetscInt aOff_x[], const PetscScalar a[], const PetscScalar a_t[], const PetscScalar a_x[], PetscReal t, PetscReal u_tShift, const PetscReal x[], const PetscReal n[], PetscInt numConstants, const PetscScalar constants[], PetscScalar g0[])
{
PetscInt c;
for (c = 0; c < dim; ++c) g0[c] = n[c];
}
/* g0_bd_pu[0*Nc+d] = n[d] (pressure-velocity coupling: df0_p/du) */
static void g0_bd_pu(PetscInt dim, PetscInt Nf, PetscInt NfAux, const PetscInt uOff[], const PetscInt uOff_x[], const PetscScalar u[], const PetscScalar u_t[], const PetscScalar u_x[], const PetscInt aOff[], const PetscInt aOff_x[], const PetscScalar a[], const PetscScalar a_t[], const PetscScalar a_x[], PetscReal t, PetscReal u_tShift, const PetscReal x[], const PetscReal n[], PetscInt numConstants, const PetscScalar constants[], PetscScalar g0[])
{
PetscInt d;
for (d = 0; d < dim; ++d) g0[d] = n[d];
}
static PetscErrorCode ProcessOptions(MPI_Comm comm, AppCtx *options)
{
PetscInt sol, bc;
PetscFunctionBeginUser;
options->sol = SOL_QUADRATIC;
options->bc = BC_ESSENTIAL;
PetscOptionsBegin(comm, "", "Stokes Problem Options", "DMPLEX");
sol = options->sol;
PetscCall(PetscOptionsEList("-sol", "The MMS solution", "ex62.c", SolTypes, PETSC_STATIC_ARRAY_LENGTH(SolTypes) - 3, SolTypes[options->sol], &sol, NULL));
options->sol = (SolType)sol;
bc = options->bc;
PetscCall(PetscOptionsEList("-bc", "The boundary condition type", "ex62.c", BCTypes, PETSC_STATIC_ARRAY_LENGTH(BCTypes) - 3, BCTypes[options->bc], &bc, NULL));
options->bc = (BCType)bc;
PetscOptionsEnd();
PetscFunctionReturn(PETSC_SUCCESS);
}
static PetscErrorCode CreateMesh(MPI_Comm comm, AppCtx *user, DM *dm)
{
PetscFunctionBeginUser;
PetscCall(DMCreate(comm, dm));
PetscCall(DMSetType(*dm, DMPLEX));
PetscCall(DMSetFromOptions(*dm));
PetscCall(DMViewFromOptions(*dm, NULL, "-dm_view"));
PetscFunctionReturn(PETSC_SUCCESS);
}
static PetscErrorCode SetupParameters(MPI_Comm comm, AppCtx *ctx)
{
Parameter *p;
PetscFunctionBeginUser;
/* setup PETSc parameter bag */
PetscCall(PetscBagCreate(PETSC_COMM_SELF, sizeof(Parameter), &ctx->bag));
PetscCall(PetscBagGetData(ctx->bag, &p));
PetscCall(PetscBagSetName(ctx->bag, "par", "Stokes Parameters"));
PetscCall(PetscBagRegisterScalar(ctx->bag, &p->mu, 1.0, "mu", "Dynamic Shear Viscosity, Pa s"));
PetscCall(PetscBagRegisterScalar(ctx->bag, &p->eta, 100.0, "eta", "Nitsche penalty parameter (dimensionless)"));
PetscCall(PetscBagSetFromOptions(ctx->bag));
{
PetscViewer viewer;
PetscViewerFormat format;
PetscBool flg;
PetscCall(PetscOptionsCreateViewer(comm, NULL, NULL, "-param_view", &viewer, &format, &flg));
if (flg) {
PetscCall(PetscViewerPushFormat(viewer, format));
PetscCall(PetscBagView(ctx->bag, viewer));
PetscCall(PetscViewerFlush(viewer));
PetscCall(PetscViewerPopFormat(viewer));
PetscCall(PetscViewerDestroy(&viewer));
}
}
PetscFunctionReturn(PETSC_SUCCESS);
}
static PetscErrorCode SetupEqn(DM dm, AppCtx *user)
{
PetscErrorCode (*exactFuncs[2])(PetscInt, PetscReal, const PetscReal[], PetscInt, PetscScalar *, void *);
void (*f0_bd_u)(PetscInt, PetscInt, PetscInt, const PetscInt[], const PetscInt[], const PetscScalar[], const PetscScalar[], const PetscScalar[], const PetscInt[], const PetscInt[], const PetscScalar[], const PetscScalar[], const PetscScalar[], PetscReal, const PetscReal[], const PetscReal[], PetscInt, const PetscScalar[], PetscScalar[]);
void (*f1_bd_u)(PetscInt, PetscInt, PetscInt, const PetscInt[], const PetscInt[], const PetscScalar[], const PetscScalar[], const PetscScalar[], const PetscInt[], const PetscInt[], const PetscScalar[], const PetscScalar[], const PetscScalar[], PetscReal, const PetscReal[], const PetscReal[], PetscInt, const PetscScalar[], PetscScalar[]);
void (*f0_bd_p)(PetscInt, PetscInt, PetscInt, const PetscInt[], const PetscInt[], const PetscScalar[], const PetscScalar[], const PetscScalar[], const PetscInt[], const PetscInt[], const PetscScalar[], const PetscScalar[], const PetscScalar[], PetscReal, const PetscReal[], const PetscReal[], PetscInt, const PetscScalar[], PetscScalar[]);
PetscDS ds;
DMLabel label;
const PetscInt id = 1;
PetscFunctionBeginUser;
PetscCall(DMGetDS(dm, &ds));
switch (user->sol) {
case SOL_QUADRATIC:
PetscCall(PetscDSSetResidual(ds, 0, f0_quadratic_u, f1_u));
exactFuncs[0] = quadratic_u;
exactFuncs[1] = quadratic_p;
f0_bd_u = f0_bd_nitsche_quadratic_u;
f1_bd_u = f1_bd_nitsche_quadratic_u;
f0_bd_p = f0_bd_nitsche_quadratic_p;
break;
case SOL_TRIG:
PetscCall(PetscDSSetResidual(ds, 0, f0_trig_u, f1_u));
exactFuncs[0] = trig_u;
exactFuncs[1] = trig_p;
f0_bd_u = f0_bd_nitsche_trig_u;
f1_bd_u = f1_bd_nitsche_trig_u;
f0_bd_p = f0_bd_nitsche_trig_p;
break;
default:
SETERRQ(PetscObjectComm((PetscObject)dm), PETSC_ERR_ARG_WRONG, "Unsupported solution type: %s (%d)", SolTypes[PetscMin(user->sol, SOL_UNKNOWN)], user->sol);
}
PetscCall(PetscDSSetResidual(ds, 1, f0_p, NULL));
PetscCall(PetscDSSetJacobian(ds, 0, 0, NULL, NULL, NULL, g3_uu));
PetscCall(PetscDSSetJacobian(ds, 0, 1, NULL, NULL, g2_up, NULL));
PetscCall(PetscDSSetJacobian(ds, 1, 0, NULL, g1_pu, NULL, NULL));
PetscCall(PetscDSSetJacobianPreconditioner(ds, 0, 0, NULL, NULL, NULL, g3_uu));
PetscCall(PetscDSSetJacobianPreconditioner(ds, 1, 1, g0_pp, NULL, NULL, NULL));
PetscCall(PetscDSSetExactSolution(ds, 0, exactFuncs[0], user));
PetscCall(PetscDSSetExactSolution(ds, 1, exactFuncs[1], user));
PetscCall(DMGetLabel(dm, "marker", &label));
switch (user->bc) {
case BC_ESSENTIAL:
PetscCall(DMAddBoundary(dm, DM_BC_ESSENTIAL, "wall", label, 1, &id, 0, 0, NULL, (PetscVoidFn *)exactFuncs[0], NULL, user, NULL));
break;
case BC_NITSCHE: {
PetscWeakForm wf;
DMLabel faceSetsLabel;
IS valueIS;
const PetscInt *faceSetValues;
PetscInt numValues, bd, i;
PetscCall(DMGetLabel(dm, "Face Sets", &faceSetsLabel));
PetscCall(DMLabelGetNumValues(faceSetsLabel, &numValues));
PetscCall(DMLabelGetValueIS(faceSetsLabel, &valueIS));
PetscCall(ISGetIndices(valueIS, &faceSetValues));
/* Velocity boundary: natural BC with Nitsche terms on all boundary faces */
PetscCall(DMAddBoundary(dm, DM_BC_NATURAL, "wall", faceSetsLabel, numValues, faceSetValues, 0, 0, NULL, NULL, NULL, user, &bd));
PetscCall(PetscDSGetBoundary(ds, bd, &wf, NULL, NULL, NULL, NULL, NULL, NULL, NULL, NULL, NULL, NULL, NULL));
for (i = 0; i < numValues; ++i) {
/* Velocity residual (field 0): f0 and f1 */
PetscCall(PetscWeakFormSetIndexBdResidual(wf, faceSetsLabel, faceSetValues[i], 0, 0, 0, f0_bd_u, 0, f1_bd_u));
/* Velocity-velocity Jacobian (field 0, field 0): g0 (penalty), g1 (consistency), g2 (symmetry) */
PetscCall(PetscWeakFormSetIndexBdJacobian(wf, faceSetsLabel, faceSetValues[i], 0, 0, 0, 0, g0_bd_uu, 0, g1_bd_uu, 0, g2_bd_uu, 0, NULL));
/* Velocity-pressure Jacobian (field 0, field 1): g0 (pressure coupling) */
PetscCall(PetscWeakFormSetIndexBdJacobian(wf, faceSetsLabel, faceSetValues[i], 0, 1, 0, 0, g0_bd_up, 0, NULL, 0, NULL, 0, NULL));
}
/* Pressure boundary: natural BC for continuity equation correction */
PetscCall(DMAddBoundary(dm, DM_BC_NATURAL, "wall_pres", faceSetsLabel, numValues, faceSetValues, 1, 0, NULL, NULL, NULL, user, &bd));
PetscCall(PetscDSGetBoundary(ds, bd, &wf, NULL, NULL, NULL, NULL, NULL, NULL, NULL, NULL, NULL, NULL, NULL));
for (i = 0; i < numValues; ++i) {
/* Pressure residual (field 1): f0 */
PetscCall(PetscWeakFormSetIndexBdResidual(wf, faceSetsLabel, faceSetValues[i], 1, 0, 0, f0_bd_p, 0, NULL));
/* Pressure-velocity Jacobian (field 1, field 0): g0 */
PetscCall(PetscWeakFormSetIndexBdJacobian(wf, faceSetsLabel, faceSetValues[i], 1, 0, 0, 0, g0_bd_pu, 0, NULL, 0, NULL, 0, NULL));
}
PetscCall(ISRestoreIndices(valueIS, &faceSetValues));
PetscCall(ISDestroy(&valueIS));
} break;
default:
SETERRQ(PetscObjectComm((PetscObject)dm), PETSC_ERR_ARG_WRONG, "Unsupported BC type: %s (%d)", BCTypes[PetscMin(user->bc, BC_UNKNOWN)], user->bc);
}
/* Make constant values available to pointwise functions */
{
Parameter *param;
PetscScalar constants[2];
PetscCall(PetscBagGetData(user->bag, ¶m));
constants[0] = param->mu; /* dynamic shear viscosity, Pa s */
constants[1] = 0.0; /* Nitsche penalty (set below if needed) */
if (user->bc == BC_NITSCHE) {
/* Compute cell size h from mesh */
PetscInt dim, cStart;
PetscReal vol, h;
PetscCall(DMGetDimension(dm, &dim));
PetscCall(DMPlexGetHeightStratum(dm, 0, &cStart, NULL));
PetscCall(DMPlexComputeCellGeometryFVM(dm, cStart, &vol, NULL, NULL));
h = PetscPowReal(vol, 1.0 / dim);
constants[1] = PetscRealPart(param->eta) * PetscRealPart(param->mu) / h;
}
PetscCall(PetscDSSetConstants(ds, 2, constants));
}
PetscFunctionReturn(PETSC_SUCCESS);
}
static PetscErrorCode zero(PetscInt dim, PetscReal time, const PetscReal x[], PetscInt Nc, PetscScalar *u, PetscCtx ctx)
{
PetscInt c;
for (c = 0; c < Nc; ++c) u[c] = 0.0;
return PETSC_SUCCESS;
}
static PetscErrorCode one(PetscInt dim, PetscReal time, const PetscReal x[], PetscInt Nc, PetscScalar *u, PetscCtx ctx)
{
PetscInt c;
for (c = 0; c < Nc; ++c) u[c] = 1.0;
return PETSC_SUCCESS;
}
static PetscErrorCode CreatePressureNullSpace(DM dm, PetscInt origField, PetscInt field, MatNullSpace *nullspace)
{
Vec vec;
PetscErrorCode (*funcs[2])(PetscInt dim, PetscReal time, const PetscReal x[], PetscInt Nf, PetscScalar *u, PetscCtx ctx) = {zero, one};
PetscFunctionBeginUser;
PetscCheck(origField == 1, PetscObjectComm((PetscObject)dm), PETSC_ERR_ARG_WRONG, "Field %" PetscInt_FMT " should be 1 for pressure", origField);
funcs[field] = one;
{
PetscDS ds;
PetscCall(DMGetDS(dm, &ds));
PetscCall(PetscObjectViewFromOptions((PetscObject)ds, NULL, "-ds_view"));
}
PetscCall(DMCreateGlobalVector(dm, &vec));
PetscCall(DMProjectFunction(dm, 0.0, funcs, NULL, INSERT_ALL_VALUES, vec));
PetscCall(VecNormalize(vec, NULL));
PetscCall(MatNullSpaceCreate(PetscObjectComm((PetscObject)dm), PETSC_FALSE, 1, &vec, nullspace));
PetscCall(VecDestroy(&vec));
/* New style for field null spaces */
{
PetscObject pressure;
MatNullSpace nullspacePres;
PetscCall(DMGetField(dm, field, NULL, &pressure));
PetscCall(MatNullSpaceCreate(PetscObjectComm(pressure), PETSC_TRUE, 0, NULL, &nullspacePres));
PetscCall(PetscObjectCompose(pressure, "nullspace", (PetscObject)nullspacePres));
PetscCall(MatNullSpaceDestroy(&nullspacePres));
}
PetscFunctionReturn(PETSC_SUCCESS);
}
static PetscErrorCode SetupProblem(DM dm, PetscErrorCode (*setupEqn)(DM, AppCtx *), AppCtx *user)
{
DM cdm = dm;
PetscQuadrature q = NULL;
PetscBool simplex;
PetscInt dim, Nf = 2, f, Nc[2];
const char *name[2] = {"velocity", "pressure"};
const char *prefix[2] = {"vel_", "pres_"};
PetscFunctionBegin;
PetscCall(DMGetDimension(dm, &dim));
PetscCall(DMPlexIsSimplex(dm, &simplex));
Nc[0] = dim;
Nc[1] = 1;
for (f = 0; f < Nf; ++f) {
PetscFE fe;
PetscCall(PetscFECreateDefault(PETSC_COMM_SELF, dim, Nc[f], simplex, prefix[f], -1, &fe));
PetscCall(PetscObjectSetName((PetscObject)fe, name[f]));
if (!q) PetscCall(PetscFEGetQuadrature(fe, &q));
PetscCall(PetscFESetQuadrature(fe, q));
PetscCall(DMSetField(dm, f, NULL, (PetscObject)fe));
PetscCall(PetscFEDestroy(&fe));
}
PetscCall(DMCreateDS(dm));
PetscCall((*setupEqn)(dm, user));
while (cdm) {
PetscCall(DMCopyDisc(dm, cdm));
PetscCall(DMSetNullSpaceConstructor(cdm, 1, CreatePressureNullSpace));
PetscCall(DMGetCoarseDM(cdm, &cdm));
}
PetscFunctionReturn(PETSC_SUCCESS);
}
int main(int argc, char **argv)
{
SNES snes;
DM dm;
Vec u;
AppCtx user;
PetscFunctionBeginUser;
PetscCall(PetscInitialize(&argc, &argv, NULL, help));
PetscCall(ProcessOptions(PETSC_COMM_WORLD, &user));
PetscCall(CreateMesh(PETSC_COMM_WORLD, &user, &dm));
PetscCall(SNESCreate(PetscObjectComm((PetscObject)dm), &snes));
PetscCall(SNESSetDM(snes, dm));
PetscCall(DMSetApplicationContext(dm, &user));
PetscCall(SetupParameters(PETSC_COMM_WORLD, &user));
PetscCall(SetupProblem(dm, SetupEqn, &user));
PetscCall(DMPlexCreateClosureIndex(dm, NULL));
PetscCall(DMCreateGlobalVector(dm, &u));
PetscCall(DMPlexSetSNESLocalFEM(dm, PETSC_FALSE, &user));
PetscCall(SNESSetFromOptions(snes));
PetscCall(DMSNESCheckFromOptions(snes, u));
PetscCall(PetscObjectSetName((PetscObject)u, "Solution"));
{
Mat J;
MatNullSpace sp;
PetscCall(SNESSetUp(snes));
PetscCall(CreatePressureNullSpace(dm, 1, 1, &sp));
PetscCall(SNESGetJacobian(snes, &J, NULL, NULL, NULL));
PetscCall(MatSetNullSpace(J, sp));
PetscCall(MatNullSpaceDestroy(&sp));
PetscCall(PetscObjectSetName((PetscObject)J, "Jacobian"));
PetscCall(MatViewFromOptions(J, NULL, "-J_view"));
}
PetscCall(SNESSolve(snes, NULL, u));
PetscCall(VecDestroy(&u));
PetscCall(SNESDestroy(&snes));
PetscCall(DMDestroy(&dm));
PetscCall(PetscBagDestroy(&user.bag));
PetscCall(PetscFinalize());
return 0;
}
static PetscErrorCode trig_p(PetscInt dim, PetscReal time, const PetscReal x[], PetscInt Nc, PetscScalar *u, PetscCtx ctx)
{
PetscInt d;
for (d = 0, u[0] = 0.0; d < dim; ++d) u[0] += PetscSinReal(2.0 * PETSC_PI * x[d]);
return PETSC_SUCCESS;
}
static void f0_trig_u(PetscInt dim, PetscInt Nf, PetscInt NfAux, const PetscInt uOff[], const PetscInt uOff_x[], const PetscScalar u[], const PetscScalar u_t[], const PetscScalar u_x[], const PetscInt aOff[], const PetscInt aOff_x[], const PetscScalar a[], const PetscScalar a_t[], const PetscScalar a_x[], PetscReal t, const PetscReal x[], PetscInt numConstants, const PetscScalar constants[], PetscScalar f0[])
{
const PetscReal mu = PetscRealPart(constants[0]);
PetscInt d;
f0[0] = -2.0 * PETSC_PI * PetscCosReal(2.0 * PETSC_PI * x[0]) - (dim - 1) * mu * PetscSqr(PETSC_PI) * PetscSinReal(PETSC_PI * x[0]);
for (d = 1; d < dim; ++d) {
f0[0] -= mu * PetscSqr(PETSC_PI) * PetscSinReal(PETSC_PI * x[d]);
f0[d] = -2.0 * PETSC_PI * PetscCosReal(2.0 * PETSC_PI * x[d]) + mu * PetscPowRealInt(PETSC_PI, 3) * PetscCosReal(PETSC_PI * x[0]) * x[d];
}
}
/* Inline helpers for computing exact velocity in void boundary kernels */
static inline void ExactVelocityQuadratic(PetscInt dim, const PetscReal x[], PetscScalar g[])
{
PetscInt c;
g[0] = (dim - 1) * x[0] * x[0];
for (c = 1; c < dim; ++c) {
g[0] += x[c] * x[c];
g[c] = 2.0 * x[0] * x[0] - 2.0 * x[0] * x[c];
}
}
static inline void ExactVelocityTrig(PetscInt dim, const PetscReal x[], PetscScalar g[])
{
PetscInt c;
g[0] = (dim - 1) * PetscSinReal(PETSC_PI * x[0]);
for (c = 1; c < dim; ++c) {
g[0] += PetscSinReal(PETSC_PI * x[c]);
g[c] = -PETSC_PI * PetscCosReal(PETSC_PI * x[0]) * x[c];
}
}
/* Nitsche boundary residual kernels for velocity (field 0)
f0_bd_u[c] = -mu * sum_d (u_x[c*dim+d] + u_x[d*dim+c]) * n[d] (consistency: stress flux from IBP)
+ p * n[c] (pressure flux from IBP)
+ penalty * (u[c] - g[c]) (penalty) */
static void f0_bd_nitsche_quadratic_u(PetscInt dim, PetscInt Nf, PetscInt NfAux, const PetscInt uOff[], const PetscInt uOff_x[], const PetscScalar u[], const PetscScalar u_t[], const PetscScalar u_x[], const PetscInt aOff[], const PetscInt aOff_x[], const PetscScalar a[], const PetscScalar a_t[], const PetscScalar a_x[], PetscReal t, const PetscReal x[], const PetscReal n[], PetscInt numConstants, const PetscScalar constants[], PetscScalar f0[])
{
const PetscReal mu = PetscRealPart(constants[0]);
const PetscReal penalty = PetscRealPart(constants[1]);
PetscScalar g[3];
PetscInt c, d;
ExactVelocityQuadratic(dim, x, g);
for (c = 0; c < dim; ++c) {
f0[c] = penalty * (u[c] - g[c]) + u[uOff[1]] * n[c];
for (d = 0; d < dim; ++d) f0[c] -= mu * (u_x[c * dim + d] + u_x[d * dim + c]) * n[d];
}
}
static void f0_bd_nitsche_trig_u(PetscInt dim, PetscInt Nf, PetscInt NfAux, const PetscInt uOff[], const PetscInt uOff_x[], const PetscScalar u[], const PetscScalar u_t[], const PetscScalar u_x[], const PetscInt aOff[], const PetscInt aOff_x[], const PetscScalar a[], const PetscScalar a_t[], const PetscScalar a_x[], PetscReal t, const PetscReal x[], const PetscReal n[], PetscInt numConstants, const PetscScalar constants[], PetscScalar f0[])
{
const PetscReal mu = PetscRealPart(constants[0]);
const PetscReal penalty = PetscRealPart(constants[1]);
PetscScalar g[3];
PetscInt c, d;
ExactVelocityTrig(dim, x, g);
for (c = 0; c < dim; ++c) {
f0[c] = penalty * (u[c] - g[c]) + u[uOff[1]] * n[c];
for (d = 0; d < dim; ++d) f0[c] -= mu * (u_x[c * dim + d] + u_x[d * dim + c]) * n[d];
}
}
/* f1_bd_u[c*dim+d] = -mu * (n[d]*(u[c]-g[c]) + n[c]*(u[d]-g[d])) (symmetry / adjoint consistency) */
static void f1_bd_nitsche_quadratic_u(PetscInt dim, PetscInt Nf, PetscInt NfAux, const PetscInt uOff[], const PetscInt uOff_x[], const PetscScalar u[], const PetscScalar u_t[], const PetscScalar u_x[], const PetscInt aOff[], const PetscInt aOff_x[], const PetscScalar a[], const PetscScalar a_t[], const PetscScalar a_x[], PetscReal t, const PetscReal x[], const PetscReal n[], PetscInt numConstants, const PetscScalar constants[], PetscScalar f1[])
{
const PetscReal mu = PetscRealPart(constants[0]);
PetscScalar g[3];
PetscInt c, d;
ExactVelocityQuadratic(dim, x, g);
for (c = 0; c < dim; ++c)
for (d = 0; d < dim; ++d) f1[c * dim + d] = -mu * (n[d] * (u[c] - g[c]) + n[c] * (u[d] - g[d]));
}
static void f1_bd_nitsche_trig_u(PetscInt dim, PetscInt Nf, PetscInt NfAux, const PetscInt uOff[], const PetscInt uOff_x[], const PetscScalar u[], const PetscScalar u_t[], const PetscScalar u_x[], const PetscInt aOff[], const PetscInt aOff_x[], const PetscScalar a[], const PetscScalar a_t[], const PetscScalar a_x[], PetscReal t, const PetscReal x[], const PetscReal n[], PetscInt numConstants, const PetscScalar constants[], PetscScalar f1[])
{
const PetscReal mu = PetscRealPart(constants[0]);
PetscScalar g[3];
PetscInt c, d;
ExactVelocityTrig(dim, x, g);
for (c = 0; c < dim; ++c)
for (d = 0; d < dim; ++d) f1[c * dim + d] = -mu * (n[d] * (u[c] - g[c]) + n[c] * (u[d] - g[d]));
}
/* Nitsche boundary residual kernels for pressure (field 1)
f0_bd_p = sum_d n[d] * (u[d] - g[d]) (continuity equation boundary correction) */
static void f0_bd_nitsche_quadratic_p(PetscInt dim, PetscInt Nf, PetscInt NfAux, const PetscInt uOff[], const PetscInt uOff_x[], const PetscScalar u[], const PetscScalar u_t[], const PetscScalar u_x[], const PetscInt aOff[], const PetscInt aOff_x[], const PetscScalar a[], const PetscScalar a_t[], const PetscScalar a_x[], PetscReal t, const PetscReal x[], const PetscReal n[], PetscInt numConstants, const PetscScalar constants[], PetscScalar f0[])
{
PetscScalar g[3];
PetscInt d;
ExactVelocityQuadratic(dim, x, g);
f0[0] = 0.0;
for (d = 0; d < dim; ++d) f0[0] += n[d] * (u[d] - g[d]);
}
static void f0_bd_nitsche_trig_p(PetscInt dim, PetscInt Nf, PetscInt NfAux, const PetscInt uOff[], const PetscInt uOff_x[], const PetscScalar u[], const PetscScalar u_t[], const PetscScalar u_x[], const PetscInt aOff[], const PetscInt aOff_x[], const PetscScalar a[], const PetscScalar a_t[], const PetscScalar a_x[], PetscReal t, const PetscReal x[], const PetscReal n[], PetscInt numConstants, const PetscScalar constants[], PetscScalar f0[])
{
PetscScalar g[3];
PetscInt d;
ExactVelocityTrig(dim, x, g);
f0[0] = 0.0;
for (d = 0; d < dim; ++d) f0[0] += n[d] * (u[d] - g[d]);
}
/* Nitsche boundary Jacobian kernels (solution-independent)
g0_bd_uu[c*Nc+d] = delta(c,d) * penalty (penalty Jacobian) */
static void g0_bd_uu(PetscInt dim, PetscInt Nf, PetscInt NfAux, const PetscInt uOff[], const PetscInt uOff_x[], const PetscScalar u[], const PetscScalar u_t[], const PetscScalar u_x[], const PetscInt aOff[], const PetscInt aOff_x[], const PetscScalar a[], const PetscScalar a_t[], const PetscScalar a_x[], PetscReal t, PetscReal u_tShift, const PetscReal x[], const PetscReal n[], PetscInt numConstants, const PetscScalar constants[], PetscScalar g0[])
{
const PetscReal penalty = PetscRealPart(constants[1]);
const PetscInt Nc = uOff[1] - uOff[0];
PetscInt c;
for (c = 0; c < Nc; ++c) g0[c * Nc + c] = penalty;
}
/* g1_bd_uu[(c*Nc+d)*dim+e] = -mu * (delta(c,d)*n[e] + delta(c,e)*n[d]) (consistency Jacobian: df0/du_x) */
static void g1_bd_uu(PetscInt dim, PetscInt Nf, PetscInt NfAux, const PetscInt uOff[], const PetscInt uOff_x[], const PetscScalar u[], const PetscScalar u_t[], const PetscScalar u_x[], const PetscInt aOff[], const PetscInt aOff_x[], const PetscScalar a[], const PetscScalar a_t[], const PetscScalar a_x[], PetscReal t, PetscReal u_tShift, const PetscReal x[], const PetscReal n[], PetscInt numConstants, const PetscScalar constants[], PetscScalar g1[])
{
const PetscReal mu = PetscRealPart(constants[0]);
const PetscInt Nc = uOff[1] - uOff[0];
PetscInt c, d, e;
for (c = 0; c < Nc; ++c)
for (d = 0; d < Nc; ++d)
for (e = 0; e < dim; ++e) g1[(c * Nc + d) * dim + e] = -mu * ((c == d ? 1.0 : 0.0) * n[e] + (c == e ? 1.0 : 0.0) * n[d]);
}
/* g2_bd_uu[(c*Nc+d)*dim+e] = -mu * (n[e]*delta(c,d) + n[c]*delta(e,d)) (symmetry Jacobian: df1/du) */
static void g2_bd_uu(PetscInt dim, PetscInt Nf, PetscInt NfAux, const PetscInt uOff[], const PetscInt uOff_x[], const PetscScalar u[], const PetscScalar u_t[], const PetscScalar u_x[], const PetscInt aOff[], const PetscInt aOff_x[], const PetscScalar a[], const PetscScalar a_t[], const PetscScalar a_x[], PetscReal t, PetscReal u_tShift, const PetscReal x[], const PetscReal n[], PetscInt numConstants, const PetscScalar constants[], PetscScalar g2[])
{
const PetscReal mu = PetscRealPart(constants[0]);
const PetscInt Nc = uOff[1] - uOff[0];
PetscInt c, d, e;
for (c = 0; c < Nc; ++c)
for (d = 0; d < Nc; ++d)
for (e = 0; e < dim; ++e) g2[(c * Nc + d) * dim + e] = -mu * (n[e] * (c == d ? 1.0 : 0.0) + n[c] * (e == d ? 1.0 : 0.0));
}
/* g0_bd_up[c*1+0] = n[c] (velocity-pressure coupling: df0_u/dp) */
static void g0_bd_up(PetscInt dim, PetscInt Nf, PetscInt NfAux, const PetscInt uOff[], const PetscInt uOff_x[], const PetscScalar u[], const PetscScalar u_t[], const PetscScalar u_x[], const PetscInt aOff[], const PetscInt aOff_x[], const PetscScalar a[], const PetscScalar a_t[], const PetscScalar a_x[], PetscReal t, PetscReal u_tShift, const PetscReal x[], const PetscReal n[], PetscInt numConstants, const PetscScalar constants[], PetscScalar g0[])
{
PetscInt c;
for (c = 0; c < dim; ++c) g0[c] = n[c];
}
/* g0_bd_pu[0*Nc+d] = n[d] (pressure-velocity coupling: df0_p/du) */
static void g0_bd_pu(PetscInt dim, PetscInt Nf, PetscInt NfAux, const PetscInt uOff[], const PetscInt uOff_x[], const PetscScalar u[], const PetscScalar u_t[], const PetscScalar u_x[], const PetscInt aOff[], const PetscInt aOff_x[], const PetscScalar a[], const PetscScalar a_t[], const PetscScalar a_x[], PetscReal t, PetscReal u_tShift, const PetscReal x[], const PetscReal n[], PetscInt numConstants, const PetscScalar constants[], PetscScalar g0[])
{
PetscInt d;
for (d = 0; d < dim; ++d) g0[d] = n[d];
}
static PetscErrorCode ProcessOptions(MPI_Comm comm, AppCtx *options)
{
PetscInt sol, bc;
PetscFunctionBeginUser;
options->sol = SOL_QUADRATIC;
options->bc = BC_ESSENTIAL;
PetscOptionsBegin(comm, "", "Stokes Problem Options", "DMPLEX");
sol = options->sol;
PetscCall(PetscOptionsEList("-sol", "The MMS solution", "ex62.c", SolTypes, PETSC_STATIC_ARRAY_LENGTH(SolTypes) - 3, SolTypes[options->sol], &sol, NULL));
options->sol = (SolType)sol;
bc = options->bc;
PetscCall(PetscOptionsEList("-bc", "The boundary condition type", "ex62.c", BCTypes, PETSC_STATIC_ARRAY_LENGTH(BCTypes) - 3, BCTypes[options->bc], &bc, NULL));
options->bc = (BCType)bc;
PetscOptionsEnd();
PetscFunctionReturn(PETSC_SUCCESS);
}
static PetscErrorCode CreateMesh(MPI_Comm comm, AppCtx *user, DM *dm)
{
PetscFunctionBeginUser;
PetscCall(DMCreate(comm, dm));
PetscCall(DMSetType(*dm, DMPLEX));
PetscCall(DMSetFromOptions(*dm));
PetscCall(DMViewFromOptions(*dm, NULL, "-dm_view"));
PetscFunctionReturn(PETSC_SUCCESS);
}
static PetscErrorCode SetupParameters(MPI_Comm comm, AppCtx *ctx)
{
Parameter *p;
PetscFunctionBeginUser;
/* setup PETSc parameter bag */
PetscCall(PetscBagCreate(PETSC_COMM_SELF, sizeof(Parameter), &ctx->bag));
PetscCall(PetscBagGetData(ctx->bag, &p));
PetscCall(PetscBagSetName(ctx->bag, "par", "Stokes Parameters"));
PetscCall(PetscBagRegisterScalar(ctx->bag, &p->mu, 1.0, "mu", "Dynamic Shear Viscosity, Pa s"));
PetscCall(PetscBagRegisterScalar(ctx->bag, &p->eta, 100.0, "eta", "Nitsche penalty parameter (dimensionless)"));
PetscCall(PetscBagSetFromOptions(ctx->bag));
{
PetscViewer viewer;
PetscViewerFormat format;
PetscBool flg;
PetscCall(PetscOptionsCreateViewer(comm, NULL, NULL, "-param_view", &viewer, &format, &flg));
if (flg) {
PetscCall(PetscViewerPushFormat(viewer, format));
PetscCall(PetscBagView(ctx->bag, viewer));
PetscCall(PetscViewerFlush(viewer));
PetscCall(PetscViewerPopFormat(viewer));
PetscCall(PetscViewerDestroy(&viewer));
}
}
PetscFunctionReturn(PETSC_SUCCESS);
}
static PetscErrorCode SetupEqn(DM dm, AppCtx *user)
{
PetscErrorCode (*exactFuncs[2])(PetscInt, PetscReal, const PetscReal[], PetscInt, PetscScalar *, void *);
void (*f0_bd_u)(PetscInt, PetscInt, PetscInt, const PetscInt[], const PetscInt[], const PetscScalar[], const PetscScalar[], const PetscScalar[], const PetscInt[], const PetscInt[], const PetscScalar[], const PetscScalar[], const PetscScalar[], PetscReal, const PetscReal[], const PetscReal[], PetscInt, const PetscScalar[], PetscScalar[]);
void (*f1_bd_u)(PetscInt, PetscInt, PetscInt, const PetscInt[], const PetscInt[], const PetscScalar[], const PetscScalar[], const PetscScalar[], const PetscInt[], const PetscInt[], const PetscScalar[], const PetscScalar[], const PetscScalar[], PetscReal, const PetscReal[], const PetscReal[], PetscInt, const PetscScalar[], PetscScalar[]);
void (*f0_bd_p)(PetscInt, PetscInt, PetscInt, const PetscInt[], const PetscInt[], const PetscScalar[], const PetscScalar[], const PetscScalar[], const PetscInt[], const PetscInt[], const PetscScalar[], const PetscScalar[], const PetscScalar[], PetscReal, const PetscReal[], const PetscReal[], PetscInt, const PetscScalar[], PetscScalar[]);
PetscDS ds;
DMLabel label;
const PetscInt id = 1;
PetscFunctionBeginUser;
PetscCall(DMGetDS(dm, &ds));
switch (user->sol) {
case SOL_QUADRATIC:
PetscCall(PetscDSSetResidual(ds, 0, f0_quadratic_u, f1_u));
exactFuncs[0] = quadratic_u;
exactFuncs[1] = quadratic_p;
f0_bd_u = f0_bd_nitsche_quadratic_u;
f1_bd_u = f1_bd_nitsche_quadratic_u;
f0_bd_p = f0_bd_nitsche_quadratic_p;
break;
case SOL_TRIG:
PetscCall(PetscDSSetResidual(ds, 0, f0_trig_u, f1_u));
exactFuncs[0] = trig_u;
exactFuncs[1] = trig_p;
f0_bd_u = f0_bd_nitsche_trig_u;
f1_bd_u = f1_bd_nitsche_trig_u;
f0_bd_p = f0_bd_nitsche_trig_p;
break;
default:
SETERRQ(PetscObjectComm((PetscObject)dm), PETSC_ERR_ARG_WRONG, "Unsupported solution type: %s (%d)", SolTypes[PetscMin(user->sol, SOL_UNKNOWN)], user->sol);
}
PetscCall(PetscDSSetResidual(ds, 1, f0_p, NULL));
PetscCall(PetscDSSetJacobian(ds, 0, 0, NULL, NULL, NULL, g3_uu));
PetscCall(PetscDSSetJacobian(ds, 0, 1, NULL, NULL, g2_up, NULL));
PetscCall(PetscDSSetJacobian(ds, 1, 0, NULL, g1_pu, NULL, NULL));
PetscCall(PetscDSSetJacobianPreconditioner(ds, 0, 0, NULL, NULL, NULL, g3_uu));
PetscCall(PetscDSSetJacobianPreconditioner(ds, 1, 1, g0_pp, NULL, NULL, NULL));
PetscCall(PetscDSSetExactSolution(ds, 0, exactFuncs[0], user));
PetscCall(PetscDSSetExactSolution(ds, 1, exactFuncs[1], user));
PetscCall(DMGetLabel(dm, "marker", &label));
switch (user->bc) {
case BC_ESSENTIAL:
PetscCall(DMAddBoundary(dm, DM_BC_ESSENTIAL, "wall", label, 1, &id, 0, 0, NULL, (PetscVoidFn *)exactFuncs[0], NULL, user, NULL));
break;
case BC_NITSCHE: {
PetscWeakForm wf;
DMLabel faceSetsLabel;
IS valueIS;
const PetscInt *faceSetValues;
PetscInt numValues, bd, i;
PetscCall(DMGetLabel(dm, "Face Sets", &faceSetsLabel));
PetscCall(DMLabelGetNumValues(faceSetsLabel, &numValues));
PetscCall(DMLabelGetValueIS(faceSetsLabel, &valueIS));
PetscCall(ISGetIndices(valueIS, &faceSetValues));
/* Velocity boundary: natural BC with Nitsche terms on all boundary faces */
PetscCall(DMAddBoundary(dm, DM_BC_NATURAL, "wall", faceSetsLabel, numValues, faceSetValues, 0, 0, NULL, NULL, NULL, user, &bd));
PetscCall(PetscDSGetBoundary(ds, bd, &wf, NULL, NULL, NULL, NULL, NULL, NULL, NULL, NULL, NULL, NULL, NULL));
for (i = 0; i < numValues; ++i) {
/* Velocity residual (field 0): f0 and f1 */
PetscCall(PetscWeakFormSetIndexBdResidual(wf, faceSetsLabel, faceSetValues[i], 0, 0, 0, f0_bd_u, 0, f1_bd_u));
/* Velocity-velocity Jacobian (field 0, field 0): g0 (penalty), g1 (consistency), g2 (symmetry) */
PetscCall(PetscWeakFormSetIndexBdJacobian(wf, faceSetsLabel, faceSetValues[i], 0, 0, 0, 0, g0_bd_uu, 0, g1_bd_uu, 0, g2_bd_uu, 0, NULL));
/* Velocity-pressure Jacobian (field 0, field 1): g0 (pressure coupling) */
PetscCall(PetscWeakFormSetIndexBdJacobian(wf, faceSetsLabel, faceSetValues[i], 0, 1, 0, 0, g0_bd_up, 0, NULL, 0, NULL, 0, NULL));
}
/* Pressure boundary: natural BC for continuity equation correction */
PetscCall(DMAddBoundary(dm, DM_BC_NATURAL, "wall_pres", faceSetsLabel, numValues, faceSetValues, 1, 0, NULL, NULL, NULL, user, &bd));
PetscCall(PetscDSGetBoundary(ds, bd, &wf, NULL, NULL, NULL, NULL, NULL, NULL, NULL, NULL, NULL, NULL, NULL));
for (i = 0; i < numValues; ++i) {
/* Pressure residual (field 1): f0 */
PetscCall(PetscWeakFormSetIndexBdResidual(wf, faceSetsLabel, faceSetValues[i], 1, 0, 0, f0_bd_p, 0, NULL));
/* Pressure-velocity Jacobian (field 1, field 0): g0 */
PetscCall(PetscWeakFormSetIndexBdJacobian(wf, faceSetsLabel, faceSetValues[i], 1, 0, 0, 0, g0_bd_pu, 0, NULL, 0, NULL, 0, NULL));
}
PetscCall(ISRestoreIndices(valueIS, &faceSetValues));
PetscCall(ISDestroy(&valueIS));
} break;
default:
SETERRQ(PetscObjectComm((PetscObject)dm), PETSC_ERR_ARG_WRONG, "Unsupported BC type: %s (%d)", BCTypes[PetscMin(user->bc, BC_UNKNOWN)], user->bc);
}
/* Make constant values available to pointwise functions */
{
Parameter *param;
PetscScalar constants[2];
PetscCall(PetscBagGetData(user->bag, ¶m));
constants[0] = param->mu; /* dynamic shear viscosity, Pa s */
constants[1] = 0.0; /* Nitsche penalty (set below if needed) */
if (user->bc == BC_NITSCHE) {
/* Compute cell size h from mesh */
PetscInt dim, cStart;
PetscReal vol, h;
PetscCall(DMGetDimension(dm, &dim));
PetscCall(DMPlexGetHeightStratum(dm, 0, &cStart, NULL));
PetscCall(DMPlexComputeCellGeometryFVM(dm, cStart, &vol, NULL, NULL));
h = PetscPowReal(vol, 1.0 / dim);
constants[1] = PetscRealPart(param->eta) * PetscRealPart(param->mu) / h;
}
PetscCall(PetscDSSetConstants(ds, 2, constants));
}
PetscFunctionReturn(PETSC_SUCCESS);
}
static PetscErrorCode zero(PetscInt dim, PetscReal time, const PetscReal x[], PetscInt Nc, PetscScalar *u, PetscCtx ctx)
{
PetscInt c;
for (c = 0; c < Nc; ++c) u[c] = 0.0;
return PETSC_SUCCESS;
}
static PetscErrorCode one(PetscInt dim, PetscReal time, const PetscReal x[], PetscInt Nc, PetscScalar *u, PetscCtx ctx)
{
PetscInt c;
for (c = 0; c < Nc; ++c) u[c] = 1.0;
return PETSC_SUCCESS;
}
static PetscErrorCode CreatePressureNullSpace(DM dm, PetscInt origField, PetscInt field, MatNullSpace *nullspace)
{
Vec vec;
PetscErrorCode (*funcs[2])(PetscInt dim, PetscReal time, const PetscReal x[], PetscInt Nf, PetscScalar *u, PetscCtx ctx) = {zero, one};
PetscFunctionBeginUser;
PetscCheck(origField == 1, PetscObjectComm((PetscObject)dm), PETSC_ERR_ARG_WRONG, "Field %" PetscInt_FMT " should be 1 for pressure", origField);
funcs[field] = one;
{
PetscDS ds;
PetscCall(DMGetDS(dm, &ds));
PetscCall(PetscObjectViewFromOptions((PetscObject)ds, NULL, "-ds_view"));
}
PetscCall(DMCreateGlobalVector(dm, &vec));
PetscCall(DMProjectFunction(dm, 0.0, funcs, NULL, INSERT_ALL_VALUES, vec));
PetscCall(VecNormalize(vec, NULL));
PetscCall(MatNullSpaceCreate(PetscObjectComm((PetscObject)dm), PETSC_FALSE, 1, &vec, nullspace));
PetscCall(VecDestroy(&vec));
/* New style for field null spaces */
{
PetscObject pressure;
MatNullSpace nullspacePres;
PetscCall(DMGetField(dm, field, NULL, &pressure));
PetscCall(MatNullSpaceCreate(PetscObjectComm(pressure), PETSC_TRUE, 0, NULL, &nullspacePres));
PetscCall(PetscObjectCompose(pressure, "nullspace", (PetscObject)nullspacePres));
PetscCall(MatNullSpaceDestroy(&nullspacePres));
}
PetscFunctionReturn(PETSC_SUCCESS);
}
static PetscErrorCode SetupProblem(DM dm, PetscErrorCode (*setupEqn)(DM, AppCtx *), AppCtx *user)
{
DM cdm = dm;
PetscQuadrature q = NULL;
PetscBool simplex;
PetscInt dim, Nf = 2, f, Nc[2];
const char *name[2] = {"velocity", "pressure"};
const char *prefix[2] = {"vel_", "pres_"};
PetscFunctionBegin;
PetscCall(DMGetDimension(dm, &dim));
PetscCall(DMPlexIsSimplex(dm, &simplex));
Nc[0] = dim;
Nc[1] = 1;
for (f = 0; f < Nf; ++f) {
PetscFE fe;
PetscCall(PetscFECreateDefault(PETSC_COMM_SELF, dim, Nc[f], simplex, prefix[f], -1, &fe));
PetscCall(PetscObjectSetName((PetscObject)fe, name[f]));
if (!q) PetscCall(PetscFEGetQuadrature(fe, &q));
PetscCall(PetscFESetQuadrature(fe, q));
PetscCall(DMSetField(dm, f, NULL, (PetscObject)fe));
PetscCall(PetscFEDestroy(&fe));
}
PetscCall(DMCreateDS(dm));
PetscCall((*setupEqn)(dm, user));
while (cdm) {
PetscCall(DMCopyDisc(dm, cdm));
PetscCall(DMSetNullSpaceConstructor(cdm, 1, CreatePressureNullSpace));
PetscCall(DMGetCoarseDM(cdm, &cdm));
}
PetscFunctionReturn(PETSC_SUCCESS);
}
int main(int argc, char **argv)
{
SNES snes;
DM dm;
Vec u;
AppCtx user;
PetscFunctionBeginUser;
PetscCall(PetscInitialize(&argc, &argv, NULL, help));
PetscCall(ProcessOptions(PETSC_COMM_WORLD, &user));
PetscCall(CreateMesh(PETSC_COMM_WORLD, &user, &dm));
PetscCall(SNESCreate(PetscObjectComm((PetscObject)dm), &snes));
PetscCall(SNESSetDM(snes, dm));
PetscCall(DMSetApplicationContext(dm, &user));
PetscCall(SetupParameters(PETSC_COMM_WORLD, &user));
PetscCall(SetupProblem(dm, SetupEqn, &user));
PetscCall(DMPlexCreateClosureIndex(dm, NULL));
PetscCall(DMCreateGlobalVector(dm, &u));
PetscCall(DMPlexSetSNESLocalFEM(dm, PETSC_FALSE, &user));
PetscCall(SNESSetFromOptions(snes));
PetscCall(DMSNESCheckFromOptions(snes, u));
PetscCall(PetscObjectSetName((PetscObject)u, "Solution"));
{
Mat J;
MatNullSpace sp;
PetscCall(SNESSetUp(snes));
PetscCall(CreatePressureNullSpace(dm, 1, 1, &sp));
PetscCall(SNESGetJacobian(snes, &J, NULL, NULL, NULL));
PetscCall(MatSetNullSpace(J, sp));
PetscCall(MatNullSpaceDestroy(&sp));
PetscCall(PetscObjectSetName((PetscObject)J, "Jacobian"));
PetscCall(MatViewFromOptions(J, NULL, "-J_view"));
}
PetscCall(SNESSolve(snes, NULL, u));
PetscCall(VecDestroy(&u));
PetscCall(SNESDestroy(&snes));
PetscCall(DMDestroy(&dm));
PetscCall(PetscBagDestroy(&user.bag));
PetscCall(PetscFinalize());
return 0;
}
static void f0_quadratic_u(PetscInt dim, PetscInt Nf, PetscInt NfAux, const PetscInt uOff[], const PetscInt uOff_x[], const PetscScalar u[], const PetscScalar u_t[], const PetscScalar u_x[], const PetscInt aOff[], const PetscInt aOff_x[], const PetscScalar a[], const PetscScalar a_t[], const PetscScalar a_x[], PetscReal t, const PetscReal x[], PetscInt numConstants, const PetscScalar constants[], PetscScalar f0[])
{
const PetscReal mu = PetscRealPart(constants[0]);
PetscInt d;
f0[0] = (dim - 1) * 4.0 * mu - 1.0;
for (d = 1; d < dim; ++d) f0[d] = 4.0 * mu - 1.0;
}
}
We can now use -snes_convergence_estimate to determine the convergence exponent for the discretization. This options solves the problem on a series of refined meshes, calculates the error on each mesh, and determines the slope on a logarithmic scale. For example, we do this in two dimensions, refining our mesh twice using -convest_num_refine 2 in the following test.
suffix: 2d_p2_p1_conv
requires: triangle
# Using -dm_refine 3 gives L_2 convergence rate: [3.0, 2.1]
args: -sol trig -vel_petscspace_degree 2 -pres_petscspace_degree 1 -snes_convergence_estimate -convest_num_refine 2 -ksp_error_if_not_converged \
-ksp_atol 1e-10 -ksp_error_if_not_converged -pc_use_amat \
-pc_type fieldsplit -pc_fieldsplit_type schur -pc_fieldsplit_schur_fact_type full -pc_fieldsplit_schur_precondition a11 -pc_fieldsplit_off_diag_use_amat \
-fieldsplit_velocity_pc_type lu -fieldsplit_pressure_ksp_rtol 1e-10 -fieldsplit_pressure_pc_type lu
However, the test needs an accurate linear solver. Sparse LU factorizations do not, in general, do full pivoting. Thus we must deal with the zero pressure block explicitly. We use the PCFIELDSPLIT preconditioner and the full Schur complement factorization, but we still need a preconditioner for the Schur complement \(B^T A^{-1} B\). We can have PETSc construct that matrix automatically, but the cost rises steeply as the problem size increases. Instead, we use the fact that the Schur complement is spectrally equivalent to the pressure mass matrix \(M_p\). We can make a matrix from which the preconditioner is constructed, which has the diagonal blocks we will use to build the preconditioners, letting PETSc know that we get the off-diagonal blocks from the original system with -pc_fieldsplit_off_diag_use_amat and to build the Schur complement from the original matrix using -pc_use_amat,
PetscCall(PetscDSSetJacobianPreconditioner(ds, 0, 0, NULL, NULL, NULL, g3_uu));
PetscCall(PetscDSSetJacobianPreconditioner(ds, 1, 1, g0_pp, NULL, NULL, NULL));
Putting this all together, and using exact solvers on the subblocks, we have
suffix: 2d_p2_p1_conv
requires: triangle
# Using -dm_refine 3 gives L_2 convergence rate: [3.0, 2.1]
args: -sol trig -vel_petscspace_degree 2 -pres_petscspace_degree 1 -snes_convergence_estimate -convest_num_refine 2 -ksp_error_if_not_converged \
-ksp_atol 1e-10 -ksp_error_if_not_converged -pc_use_amat \
-pc_type fieldsplit -pc_fieldsplit_type schur -pc_fieldsplit_schur_fact_type full -pc_fieldsplit_schur_precondition a11 -pc_fieldsplit_off_diag_use_amat \
-fieldsplit_velocity_pc_type lu -fieldsplit_pressure_ksp_rtol 1e-10 -fieldsplit_pressure_pc_type lu
and we see it converges, however it is superconverging in the pressure,
L_2 convergence rate: [2.6, 3.3]
If we refine the mesh using -dm_refine 3, the convergence rates become [3.0, 2.1].
Dealing with Parameters#
Like most physical problems, the Stokes problem has a parameter, the dynamic shear viscosity, which determines what solution regime we are in. To handle these parameters in PETSc, we first define a C struct to hold them,
typedef struct {
PetscScalar mu; /* dynamic shear viscosity */
PetscScalar eta; /* Nitsche penalty parameter (dimensionless) */
} Parameter;
and then add a PetscBag object to our application context. We then setup the parameter object,
static PetscErrorCode SetupParameters(MPI_Comm comm, AppCtx *ctx)
{
Parameter *p;
PetscFunctionBeginUser;
/* setup PETSc parameter bag */
PetscCall(PetscBagCreate(PETSC_COMM_SELF, sizeof(Parameter), &ctx->bag));
PetscCall(PetscBagGetData(ctx->bag, &p));
PetscCall(PetscBagSetName(ctx->bag, "par", "Stokes Parameters"));
PetscCall(PetscBagRegisterScalar(ctx->bag, &p->mu, 1.0, "mu", "Dynamic Shear Viscosity, Pa s"));
PetscCall(PetscBagRegisterScalar(ctx->bag, &p->eta, 100.0, "eta", "Nitsche penalty parameter (dimensionless)"));
PetscCall(PetscBagSetFromOptions(ctx->bag));
{
PetscViewer viewer;
PetscViewerFormat format;
PetscBool flg;
PetscCall(PetscOptionsCreateViewer(comm, NULL, NULL, "-param_view", &viewer, &format, &flg));
if (flg) {
PetscCall(PetscViewerPushFormat(viewer, format));
PetscCall(PetscBagView(ctx->bag, viewer));
PetscCall(PetscViewerFlush(viewer));
PetscCall(PetscViewerPopFormat(viewer));
PetscCall(PetscViewerDestroy(&viewer));
}
}
PetscFunctionReturn(PETSC_SUCCESS);
}
which will allow us to set the value from the command line using -mu. The PetscBag can also be persisted to disk with PetscBagLoad/View(). We can make these values available as constant to our pointwise functions through the PetscDS object.
{
Parameter *param;
PetscScalar constants[2];
PetscCall(PetscBagGetData(user->bag, ¶m));
constants[0] = param->mu; /* dynamic shear viscosity, Pa s */
constants[1] = 0.0; /* Nitsche penalty (set below if needed) */
if (user->bc == BC_NITSCHE) {
/* Compute cell size h from mesh */
PetscInt dim, cStart;
PetscReal vol, h;
PetscCall(DMGetDimension(dm, &dim));
PetscCall(DMPlexGetHeightStratum(dm, 0, &cStart, NULL));
PetscCall(DMPlexComputeCellGeometryFVM(dm, cStart, &vol, NULL, NULL));
h = PetscPowReal(vol, 1.0 / dim);
constants[1] = PetscRealPart(param->eta) * PetscRealPart(param->mu) / h;
}
Investigating convergence#
In order to look at the convergence of some harder problems, we will examine SNES ex69. This example provides an exact solution to the variable viscosity Stokes equation. The sharp viscosity variation will allow us to investigate convergence of the solver and discretization. Briefly, a sharp viscosity variation is created across the unit square, imposed on a background pressure with given fundamental frequency. For example, we can create examples with period one half and viscosity \(e^{2 B x}\) (solKx)
$ make -f ./gmakefile test search="snes_tutorials-ex69_p2p1" EXTRA_OPTIONS="-dm_refine 5 -dm_view hdf5:$PETSC_DIR/sol.h5 -snes_view_solution hdf5:$PETSC_DIR/sol.h5::append -exact_vec_view hdf5:$PETSC_DIR/sol.h5::append -m 2 -n 2 -B 1"
$ make -f ./gmakefile test search="snes_tutorials-ex69_p2p1" EXTRA_OPTIONS="-dm_refine 5 -dm_view hdf5:$PETSC_DIR/sol.h5 -snes_view_solution hdf5:$PETSC_DIR/sol.h5::append -exact_vec_view hdf5:$PETSC_DIR/sol.h5::append -m 2 -n 2 -B 3.75"
which are show in the figure below.
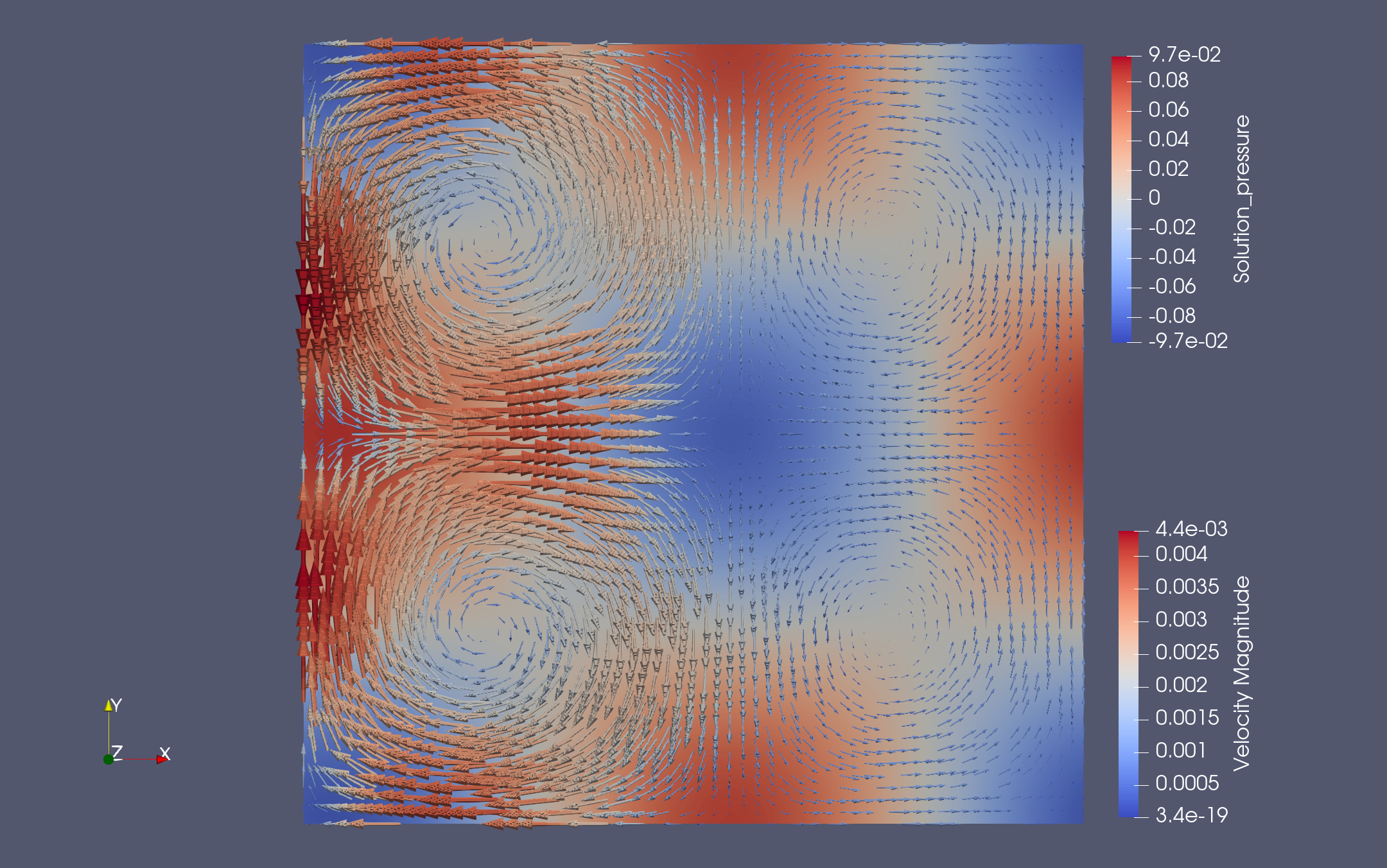
Solution for \(m=2\), \(n=2\), \(B=1\)# |
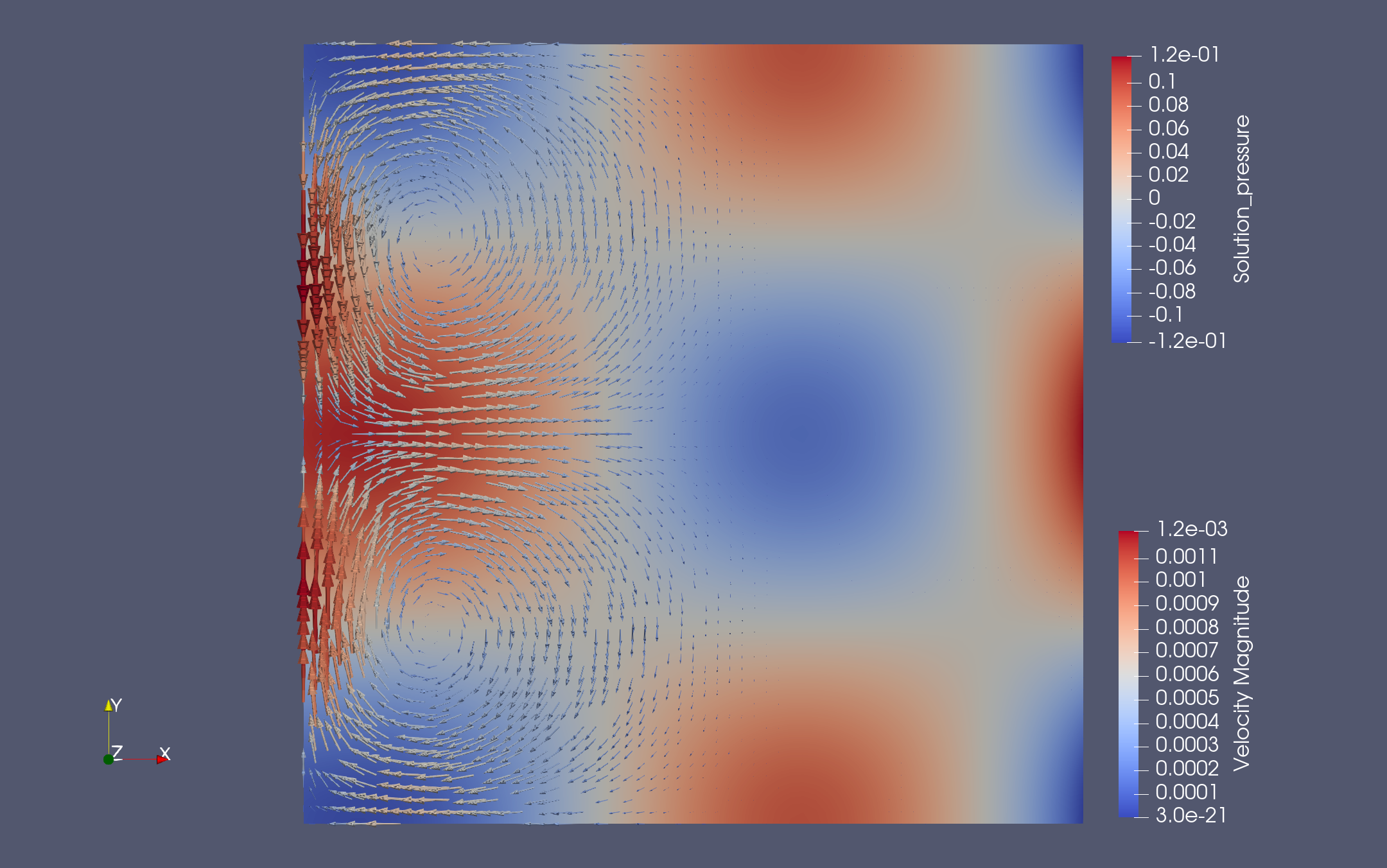
Solution for \(m=2\), \(n=2\), \(B=3.75\)# |
Debugging#
If we can provide the PetscDS object in our problem with the exact solution function, PETSc has good support for debugging our discretization and solver. We can use the PetscConvEst object to check the convergence behavior of our element automatically. For example, if we use the -snes_convergence_estimate option, PETSc will solve our nonlinear equations on a series of refined meshes, use our exact solution to calculate the error, and then fit this line on a log-log scale to get the convergence rate,
suffix: p2p1_conv
requires: triangle
# -dm_refine 2 gives L_2 convergence rate: [3.0, 2.2]
args: -dm_plex_separate_marker -vel_petscspace_degree 2 -pres_petscspace_degree 1 \
-snes_error_if_not_converged -snes_convergence_estimate -convest_num_refine 2 \
-ksp_rtol 1.e-9 -ksp_error_if_not_converged -pc_use_amat \
-pc_type fieldsplit -pc_fieldsplit_type schur -pc_fieldsplit_schur_factorization_type full -pc_fieldsplit_schur_precondition a11 \
-fieldsplit_velocity_pc_type lu \
-fieldsplit_pressure_ksp_rtol 1.e-9 -fieldsplit_pressure_pc_type lu
If we initially refine the mesh twice, -dm_refine 2, we get
L_2 convergence rate: [3.0, 2.2]
which are the convergence rates we expect for the velocity and pressure using a \(P_2-P_1\) discretization. For \(Q_1-P_0\)
suffix: q1p0_conv
# -dm_refine 2 gives L_2 convergence rate: [2.0, 1.0]
args: -dm_plex_simplex 0 -dm_plex_separate_marker -vel_petscspace_degree 1 -pres_petscspace_degree 0 \
-snes_error_if_not_converged -snes_convergence_estimate -convest_num_refine 2 \
-ksp_rtol 1.e-9 -ksp_error_if_not_converged -pc_use_amat \
-pc_type fieldsplit -pc_fieldsplit_type schur -pc_fieldsplit_schur_factorization_type full -pc_fieldsplit_schur_precondition a11 \
-fieldsplit_velocity_pc_type lu \
-fieldsplit_pressure_ksp_rtol 1.e-9 -fieldsplit_pressure_pc_type lu
we get
L_2 convergence rate: [2.0, 1.0]
This is a sensitive check that everything is working correctly. However, if this is wrong, where can I start? More fine-grained checks are available using the -dmsnes_check option. Using this for our \(P_2-P_1\) example (the p2p1 test), we have
L_2 Error: [0.000439127, 0.0376629]
L_2 Residual: 0.0453958
Function appears to be linear
The first line records the discretization error for our exact solution. This means that we project our solution function into the finite element space and then calculate the \(L_2\) norm of the difference between the exact solution and its projection. The norm is computed for each field separately. Next, PETSc calculates the residual using the projected exact solution as input. This should be small, and as the mesh is refined it should approach zero. Last, PETSc uses a Taylor test to try and determine how the error in the linear model scales as a function of the perturbation \(h\). Thus, in a nonlinear situation we would expect
Taylor approximation converging at order 2.0
In this case, since the viscosity does not depend on the velocity or pressure fields, we detect that the linear model is exact
Function appears to be linear
Suppose that we have made an error in the Jacobian. For instance, let us accidentally flip the sign of the pressure term in the momentum Jacobian.
static void stokes_momentum_pres_J(PetscInt dim, PetscInt Nf, PetscInt NfAux, const PetscInt uOff[], const PetscInt uOff_x[], const PetscScalar u[], const PetscScalar u_t[], const PetscScalar u_x[], const PetscInt aOff[], const PetscInt aOff_x[], const PetscScalar a[], const PetscScalar a_t[], const PetscScalar a_x[], PetscReal t, PetscReal u_tShift, const PetscReal x[], PetscInt numConstants, const PetscScalar constants[], PetscScalar g2[])
{
PetscInt d;
for (d = 0; d < dim; ++d) g2[d * dim + d] = -1.0; /* \frac{\partial\psi^{u_d}}{\partial x_d} */
When we run, we get a failure of the nonlinear solver. Our checking reveals that the Jacobian is wrong because it is converging at order 1 instead of 2, meaning the linear term is not correct in our model.
$ make -f ./gmakefile test search="snes_tutorials-ex69_p2p1" EXTRA_OPTIONS="-snes_monitor -ksp_monitor_true_residual -ksp_converged_reason"
L_2 Error: [0.000439127, 0.0376629]
L_2 Residual: 0.0453958
Taylor approximation converging at order 1.00
0 SNES Function norm 1.170604545948e-01
0 KSP preconditioned resid norm 4.965098891419e-01 true resid norm 1.170604545948e-01 ||r(i)||/||b|| 1.000000000000e+00
1 KSP preconditioned resid norm 9.236805404733e-11 true resid norm 1.460082233654e-12 ||r(i)||/||b|| 1.247289051378e-11
Linear solve converged due to CONVERGED_ATOL iterations 1
[0]PETSC ERROR: --------------------- Error Message --------------------------------------------------------------
[0]PETSC ERROR:
[0]PETSC ERROR: SNESSolve has not converged
In order to track down the error, we can use -snes_test_jacobian which computes a finite difference approximation to the Jacobian and compares that to the analytic Jacobian. We ignore the first test, which occurs during our testing of the Jacobian, and look at the test that happens during the first Newton iterate. We see that the relative error in the Frobenius norm is about one percent, which indicates we have a real problem.
$ make -f ./gmakefile test search="snes_tutorials-ex69_p2p1" EXTRA_OPTIONS="-snes_monitor -ksp_monitor_true_residual -ksp_converged_reason -snes_test_jacobian"
L_2 Error: [0.000439127, 0.0376629]
L_2 Residual: 0.0453958
---------- Testing Jacobian -------------
Run with -snes_test_jacobian_view and optionally -snes_test_jacobian <threshold> to show difference
of hand-coded and finite difference Jacobian entries greater than <threshold>.
Testing hand-coded Jacobian, if (for double precision runs) ||J - Jfd||_F/||J||_F is
O(1.e-8), the hand-coded Jacobian is probably correct.
||J - Jfd||_F/||J||_F = 136.793, ||J - Jfd||_F = 136.793
---------- Testing Jacobian for preconditioner -------------
||J - Jfd||_F/||J||_F = 136.793, ||J - Jfd||_F = 136.793
Taylor approximation converging at order 1.00
0 SNES Function norm 1.170604545948e-01
---------- Testing Jacobian -------------
||J - Jfd||_F/||J||_F = 0.0119377, ||J - Jfd||_F = 1.63299
---------- Testing Jacobian for preconditioner -------------
||J - Jfd||_F/||J||_F = 0.008471, ||J - Jfd||_F = 1.15873
0 KSP preconditioned resid norm 4.965098891419e-01 true resid norm 1.170604545948e-01 ||r(i)||/||b|| 1.000000000000e+00
1 KSP preconditioned resid norm 9.236804064319e-11 true resid norm 1.460031196842e-12 ||r(i)||/||b|| 1.247245452699e-11
Linear solve converged due to CONVERGED_ATOL iterations 1
[0]PETSC ERROR: --------------------- Error Message --------------------------------------------------------------
[0]PETSC ERROR:
[0]PETSC ERROR: SNESSolve has not converged
At this point, we could just go back and check the code. However, PETSc will also print out the differences between the analytic and approximate Jacobians. When we give the -snes_test_jacobian_view option, the code will print both Jacobians (which we omit) and then their difference, and will also do this for the matrix used to construct the preconditioner (which we omit). It is clear from the output that the \(u-p\) block of the Jacobian is wrong, and thus we know right where to look for our error. Moreover, if we look at the values in row 15, we see that the values just differ by a sign.
$ make -f ./gmakefile test search="snes_tutorials-ex69_p2p1" EXTRA_OPTIONS="-snes_monitor -ksp_monitor_true_residual -ksp_converged_reason -snes_test_jacobian"
Hand-coded minus finite-difference Jacobian with tolerance 1e-05 ----------
Mat Object: 1 MPI process
type: seqaij
row 0:
row 1:
row 2:
row 3:
row 4:
row 5:
row 6:
row 7:
row 8:
row 9:
row 10:
row 11:
row 12:
row 13:
row 14:
row 15: (0, 0.166667) (2, -0.166667)
row 16: (0, 0.166667) (2, -0.166667) (5, 0.166667) (8, -0.166667)
row 17: (0, 0.166667) (2, 0.166667) (5, -0.166667) (8, -0.166667)
row 18: (0, 0.166667) (5, -0.166667)
row 19: (5, 0.166667) (8, -0.166667) (11, 0.166667) (13, -0.166667)
row 20: (5, 0.166667) (8, 0.166667) (11, -0.166667) (13, -0.166667)
row 21: (5, 0.166667) (11, -0.166667)
row 22: (5, 0.333333) (8, -0.333333)
row 23: (2, 0.166667) (5, 0.166667) (8, -0.166667) (11, -0.166667)
row 24: (2, 0.166667) (3, -0.166667) (5, 0.166667) (8, -0.166667)
row 25: (2, 0.333333) (8, -0.333333)
row 26: (2, 0.166667) (3, -0.166667) (8, 0.166667) (10, -0.166667)
row 27: (2, 0.166667) (3, 0.166667) (8, -0.166667) (10, -0.166667)
row 28: (3, 0.166667) (10, -0.166667)
row 29: (8, 0.333333) (10, -0.333333)
row 30: (3, 0.166667) (8, 0.166667) (10, -0.166667) (13, -0.166667)
row 31: (2, 0.166667) (3, -0.166667)
row 32: (8, 0.166667) (10, -0.166667) (13, 0.166667) (14, -0.166667)
row 33: (8, 0.166667) (10, 0.166667) (13, -0.166667) (14, -0.166667)
row 34: (10, 0.166667) (14, -0.166667)
row 35: (13, 0.166667) (14, -0.166667)
row 36: (8, 0.166667) (10, -0.166667) (11, 0.166667) (13, -0.166667)
row 37: (8, 0.333333) (13, -0.333333)
row 38: (11, 0.166667) (13, -0.166667)
0 KSP preconditioned resid norm 4.965098891419e-01 true resid norm 1.170604545948e-01 ||r(i)||/||b|| 1.000000000000e+00
1 KSP preconditioned resid norm 9.236804067326e-11 true resid norm 1.460031196842e-12 ||r(i)||/||b|| 1.247245452699e-11
Linear solve converged due to CONVERGED_ATOL iterations 1
[0]PETSC ERROR: --------------------- Error Message --------------------------------------------------------------
[0]PETSC ERROR:
[0]PETSC ERROR: SNESSolve has not converged
Can we see that the Schur complement of Q1-P0 is ill-conditioned?
Optimizing the Solver#
In order to see exactly what solver we have employed, we can use the -snes_view option. When checking \(P_2-P_1\) convergence, we use an exact solver, but it must have several parts in order to deal with the saddle-point in the Jacobian. Using the test system to provide our extra option, we get
$ make -f ./gmakefile test search="snes_tutorials-ex69_p2p1" EXTRA_OPTIONS="-snes_view"
SNES Object: 1 MPI process
type: newtonls
maximum iterations=50, maximum function evaluations=10000
tolerances: relative=1e-08, absolute=1e-50, solution=1e-08
total number of linear solver iterations=1
total number of function evaluations=2
norm schedule ALWAYS
SNESLineSearch Object: 1 MPI process
type: bt
interpolation: cubic
alpha=1.000000e-04
maxstep=1.000000e+08, minlambda=1.000000e-12
tolerances: relative=1.000000e-08, absolute=1.000000e-15, lambda=1.000000e-08
maximum iterations=40
KSP Object: 1 MPI process
type: gmres
restart=30, using classical (unmodified) Gram-Schmidt orthogonalization with no iterative refinement
happy breakdown tolerance=1e-30
maximum iterations=10000, initial guess is zero
tolerances: relative=1e-09, absolute=1e-10, divergence=10000.
left preconditioning
using PRECONDITIONED norm type for convergence test
PC Object: 1 MPI process
type: fieldsplit
FieldSplit with Schur preconditioner, factorization FULL
Preconditioner for the Schur complement formed from A11
Split info:
Split number 0 Defined by IS
Split number 1 Defined by IS
KSP solver for A00 block
KSP Object: (fieldsplit_velocity_) 1 MPI process
type: gmres
restart=30, using classical (unmodified) Gram-Schmidt orthogonalization with no iterative refinement
happy breakdown tolerance=1e-30
maximum iterations=10000, initial guess is zero
tolerances: relative=1e-05, absolute=1e-50, divergence=10000.
left preconditioning
using PRECONDITIONED norm type for convergence test
PC Object: (fieldsplit_velocity_) 1 MPI process
type: lu
out-of-place factorization
tolerance for zero pivot 2.22045e-14
matrix ordering: nd
factor fill ratio given 5., needed 1.15761
Factored matrix:
Mat Object: 1 MPI process
type: seqaij
rows=30, cols=30
package used to perform factorization: petsc
total: nonzeros=426, allocated nonzeros=426
using I-node routines: found 17 nodes, limit used is 5
linear system matrix followed by matrix used to construct the preconditioner:
Mat Object: 1 MPI process
type: seqaij
rows=30, cols=30
total: nonzeros=368, allocated nonzeros=368
total number of mallocs used during MatSetValues calls=0
using I-node routines: found 20 nodes, limit used is 5
Mat Object: (fieldsplit_velocity_) 1 MPI process
type: seqaij
rows=30, cols=30
total: nonzeros=368, allocated nonzeros=368
total number of mallocs used during MatSetValues calls=0
using I-node routines: found 20 nodes, limit used is 5
KSP solver for S = A11 - A10 inv(A00) A01
KSP Object: (fieldsplit_pressure_) 1 MPI process
type: gmres
restart=30, using classical (unmodified) Gram-Schmidt orthogonalization with no iterative refinement
happy breakdown tolerance=1e-30
maximum iterations=10000, initial guess is zero
tolerances: relative=1e-09, absolute=1e-50, divergence=10000.
left preconditioning
using PRECONDITIONED norm type for convergence test
PC Object: (fieldsplit_pressure_) 1 MPI process
type: lu
out-of-place factorization
tolerance for zero pivot 2.22045e-14
matrix ordering: nd
factor fill ratio given 5., needed 1.2439
Factored matrix:
Mat Object: 1 MPI process
type: seqaij
rows=9, cols=9
package used to perform factorization: petsc
total: nonzeros=51, allocated nonzeros=51
not using I-node routines
linear system matrix followed by matrix used to construct the preconditioner:
Mat Object: (fieldsplit_pressure_) 1 MPI process
type: schurcomplement
rows=9, cols=9
has attached null space
Schur complement A11 - A10 inv(A00) A01
A11
Mat Object: 1 MPI process
type: seqaij
rows=9, cols=9
total: nonzeros=41, allocated nonzeros=41
total number of mallocs used during MatSetValues calls=0
has attached null space
not using I-node routines
A10
Mat Object: 1 MPI process
type: seqaij
rows=9, cols=30
total: nonzeros=122, allocated nonzeros=122
total number of mallocs used during MatSetValues calls=0
not using I-node routines
KSP solver for A00 block viewable with the additional option -fc_fieldsplit_velocity_ksp_view
A01
Mat Object: 1 MPI process
type: seqaij
rows=30, cols=9
total: nonzeros=122, allocated nonzeros=122
total number of mallocs used during MatSetValues calls=0
using I-node routines: found 20 nodes, limit used is 5
Mat Object: (fieldsplit_pressure_) 1 MPI process
type: seqaij
rows=9, cols=9
total: nonzeros=41, allocated nonzeros=41
total number of mallocs used during MatSetValues calls=0
not using I-node routines
linear system matrix followed by matrix used to construct the preconditioner:
Mat Object: 1 MPI process
type: seqaij
rows=39, cols=39
total: nonzeros=653, allocated nonzeros=653
total number of mallocs used during MatSetValues calls=0
has attached null space
using I-node routines: found 24 nodes, limit used is 5
Mat Object: (prec_) 1 MPI process
type: seqaij
rows=39, cols=39
total: nonzeros=653, allocated nonzeros=653
total number of mallocs used during MatSetValues calls=0
using I-node routines: found 24 nodes, limit used is 5
Going through this piece-by-piece, we can see all the parts of our solver. At the top level, we have a SNES using Newton’s method
$ make -f ./gmakefile test search="snes_tutorials-ex69_p2p1" EXTRA_OPTIONS="-snes_view"
SNES Object: 1 MPI process
type: newtonls
maximum iterations=50, maximum function evaluations=10000
tolerances: relative=1e-08, absolute=1e-50, solution=1e-08
total number of linear solver iterations=1
total number of function evaluations=2
norm schedule ALWAYS
SNESLineSearch Object: 1 MPI process
type: bt
interpolation: cubic
alpha=1.000000e-04
maxstep=1.000000e+08, minlambda=1.000000e-12
tolerances: relative=1.000000e-08, absolute=1.000000e-15, lambda=1.000000e-08
maximum iterations=40
For each nonlinear step, we use KSPGMRES to solve the Newton equation, preconditioned by PCFIELDSPLIT. We split the problem into two blocks, with the split determined by our DM, and combine those blocks using a Schur complement. The Schur complement is faithful since we use the FULL factorization type.
$ make -f ./gmakefile test search="snes_tutorials-ex69_p2p1" EXTRA_OPTIONS="-snes_view"
KSP Object: 1 MPI process
type: gmres
restart=30, using classical (unmodified) Gram-Schmidt orthogonalization with no iterative refinement
happy breakdown tolerance=1e-30
maximum iterations=10000, initial guess is zero
tolerances: relative=1e-09, absolute=1e-10, divergence=10000.
left preconditioning
using PRECONDITIONED norm type for convergence test
PC Object: 1 MPI process
type: fieldsplit
FieldSplit with Schur preconditioner, factorization FULL
Preconditioner for the Schur complement formed from A11
Split info:
Split number 0 Defined by IS
Split number 1 Defined by IS
We form the preconditioner for the Schur complement from the (1,1) block of our matrix used to construct the preconditioner, which we have set to be the viscosity-weighted mass matrix
static void stokes_identity_J_kx(PetscInt dim, PetscInt Nf, PetscInt NfAux, const PetscInt uOff[], const PetscInt uOff_x[], const PetscScalar u[], const PetscScalar u_t[], const PetscScalar u_x[], const PetscInt aOff[], const PetscInt aOff_x[], const PetscScalar a[], const PetscScalar a_t[], const PetscScalar a_x[], PetscReal t, PetscReal u_tShift, const PetscReal x[], PetscInt numConstants, const PetscScalar constants[], PetscScalar g0[])
{
const PetscReal mu = PetscExpReal(2.0 * PetscRealPart(constants[2]) * x[0]);
g0[0] = 1.0 / mu;
}
static void stokes_identity_J_cx(PetscInt dim, PetscInt Nf, PetscInt NfAux, const PetscInt uOff[], const PetscInt uOff_x[], const PetscScalar u[], const PetscScalar u_t[], const PetscScalar u_x[], const PetscInt aOff[], const PetscInt aOff_x[], const PetscScalar a[], const PetscScalar a_t[], const PetscScalar a_x[], PetscReal t, PetscReal u_tShift, const PetscReal x[], PetscInt numConstants, const PetscScalar constants[], PetscScalar g0[])
{
const PetscReal mu = x[0] < PetscRealPart(constants[4]) ? PetscRealPart(constants[2]) : PetscRealPart(constants[3]);
g0[0] = 1.0 / mu;
}
The solver for the first block, representing the velocity, is GMRES/LU. Note that the prefix is fieldsplit_velocity_, constructed automatically from the name of the field in our DM. Also note that there are two matrices, one from our original matrix, and one from our matrix used to construct the preconditioner, but they are identical. In an optimized, scalable solver, this block would likely be solved by multigrid, but here we use LU for verification purposes.
$ make -f ./gmakefile test search="snes_tutorials-ex69_p2p1" EXTRA_OPTIONS="-snes_view"
KSP solver for A00 block
KSP Object: (fieldsplit_velocity_) 1 MPI process
type: gmres
restart=30, using classical (unmodified) Gram-Schmidt orthogonalization with no iterative refinement
happy breakdown tolerance=1e-30
maximum iterations=10000, initial guess is zero
tolerances: relative=1e-05, absolute=1e-50, divergence=10000.
left preconditioning
using PRECONDITIONED norm type for convergence test
PC Object: (fieldsplit_velocity_) 1 MPI process
type: lu
out-of-place factorization
tolerance for zero pivot 2.22045e-14
matrix ordering: nd
factor fill ratio given 5., needed 1.15761
Factored matrix:
Mat Object: 1 MPI process
type: seqaij
rows=30, cols=30
package used to perform factorization: petsc
total: nonzeros=426, allocated nonzeros=426
using I-node routines: found 17 nodes, limit used is 5
linear system matrix followed by matrix used to construct the preconditioner:
Mat Object: 1 MPI process
type: seqaij
rows=30, cols=30
total: nonzeros=368, allocated nonzeros=368
total number of mallocs used during MatSetValues calls=0
using I-node routines: found 20 nodes, limit used is 5
Mat Object: (fieldsplit_velocity_) 1 MPI process
type: seqaij
rows=30, cols=30
total: nonzeros=368, allocated nonzeros=368
total number of mallocs used during MatSetValues calls=0
using I-node routines: found 20 nodes, limit used is 5
The solver for the second block, with prefix fieldsplit_pressure_, is also GMRES/LU, however we cannot factor the Schur complement operator since we never explicitly assemble it. Thus we assemble the viscosity-weighted mass matrix on the pressure space as an approximation. Notice that the Schur complement has the velocity solver embedded in it.
$ make -f ./gmakefile test search="snes_tutorials-ex69_p2p1" EXTRA_OPTIONS="-snes_view"
KSP solver for S = A11 - A10 inv(A00) A01
KSP Object: (fieldsplit_pressure_) 1 MPI process
type: gmres
restart=30, using classical (unmodified) Gram-Schmidt orthogonalization with no iterative refinement
happy breakdown tolerance=1e-30
maximum iterations=10000, initial guess is zero
tolerances: relative=1e-09, absolute=1e-50, divergence=10000.
left preconditioning
using PRECONDITIONED norm type for convergence test
PC Object: (fieldsplit_pressure_) 1 MPI process
type: lu
out-of-place factorization
tolerance for zero pivot 2.22045e-14
matrix ordering: nd
factor fill ratio given 5., needed 1.2439
Factored matrix:
Mat Object: 1 MPI process
type: seqaij
rows=9, cols=9
package used to perform factorization: petsc
total: nonzeros=51, allocated nonzeros=51
not using I-node routines
linear system matrix followed by matrix used to construct the preconditioner:
Mat Object: (fieldsplit_pressure_) 1 MPI process
type: schurcomplement
rows=9, cols=9
has attached null space
Schur complement A11 - A10 inv(A00) A01
A11
Mat Object: 1 MPI process
type: seqaij
rows=9, cols=9
total: nonzeros=41, allocated nonzeros=41
total number of mallocs used during MatSetValues calls=0
has attached null space
not using I-node routines
A10
Mat Object: 1 MPI process
type: seqaij
rows=9, cols=30
total: nonzeros=122, allocated nonzeros=122
total number of mallocs used during MatSetValues calls=0
not using I-node routines
KSP of A00
KSP Object: (fieldsplit_velocity_) 1 MPI process
type: gmres
restart=30, using classical (unmodified) Gram-Schmidt orthogonalization with no iterative refinement
happy breakdown tolerance=1e-30
maximum iterations=10000, initial guess is zero
tolerances: relative=1e-05, absolute=1e-50, divergence=10000.
left preconditioning
using PRECONDITIONED norm type for convergence test
PC Object: (fieldsplit_velocity_) 1 MPI process
type: lu
out-of-place factorization
tolerance for zero pivot 2.22045e-14
matrix ordering: nd
factor fill ratio given 5., needed 1.15761
Factored matrix:
Mat Object: 1 MPI process
type: seqaij
rows=30, cols=30
package used to perform factorization: petsc
total: nonzeros=426, allocated nonzeros=426
using I-node routines: found 17 nodes, limit used is 5
linear system matrix followed by matrix used to construct the preconditioner:
Mat Object: 1 MPI process
type: seqaij
rows=30, cols=30
total: nonzeros=368, allocated nonzeros=368
total number of mallocs used during MatSetValues calls=0
using I-node routines: found 20 nodes, limit used is 5
Mat Object: (fieldsplit_velocity_) 1 MPI process
type: seqaij
rows=30, cols=30
total: nonzeros=368, allocated nonzeros=368
total number of mallocs used during MatSetValues calls=0
using I-node routines: found 20 nodes, limit used is 5
A01
Mat Object: 1 MPI process
type: seqaij
rows=30, cols=9
total: nonzeros=122, allocated nonzeros=122
total number of mallocs used during MatSetValues calls=0
using I-node routines: found 20 nodes, limit used is 5
Mat Object: (fieldsplit_pressure_) 1 MPI process
type: seqaij
rows=9, cols=9
total: nonzeros=41, allocated nonzeros=41
total number of mallocs used during MatSetValues calls=0
not using I-node routines
Finally, the SNES viewer reports the system matrix and matrix from which the preconditioner is constructed
$ make -f ./gmakefile test search="snes_tutorials-ex69_p2p1" EXTRA_OPTIONS="-snes_view"
linear system matrix followed by matrix used to construct the preconditioner:
Mat Object: 1 MPI process
type: seqaij
rows=39, cols=39
total: nonzeros=653, allocated nonzeros=653
total number of mallocs used during MatSetValues calls=0
has attached null space
using I-node routines: found 24 nodes, limit used is 5
Mat Object: (prec_) 1 MPI process
type: seqaij
rows=39, cols=39
total: nonzeros=653, allocated nonzeros=653
total number of mallocs used during MatSetValues calls=0
using I-node routines: found 24 nodes, limit used is 5
We see that they have the same nonzero pattern, even though the matrix used to construct the preconditioner only contains the diagonal blocks. This is because zeros were inserted to define the nonzero structure. We can remove these nonzeros by telling the DM not to insert zero at preallocation time, and also telling the matrix itself to ignore the zeros from the assembly process.
$ make -f ./gmakefile test search="snes_tutorials-ex69_p2p1" EXTRA_OPTIONS="-snes_view -dm_preallocate_only -prec_mat_ignore_zero_entries"
linear system matrix followed by matrix used to construct the preconditioner:
Mat Object: 1 MPI process
type: seqaij
rows=39, cols=39
total: nonzeros=653, allocated nonzeros=653
total number of mallocs used during MatSetValues calls=0
has attached null space
using I-node routines: found 24 nodes, limit used is 5
Mat Object: (prec_) 1 MPI process
type: seqaij
rows=39, cols=39
total: nonzeros=409, allocated nonzeros=653
total number of mallocs used during MatSetValues calls=0
using I-node routines: found 29 nodes, limit used is 5
We can see a sparsity portrait of the system and preconditioning matrices if the installation supports X-windows visualization
$ make -f ./gmakefile test search="snes_tutorials-ex69_p2p1" EXTRA_OPTIONS="-ksp_view_mat draw -prec_mat_view draw -draw_pause -1"
$ make -f ./gmakefile test search="snes_tutorials-ex69_p2p1" EXTRA_OPTIONS="-ksp_view_mat draw -prec_mat_view draw -draw_save $PETSC_DIR/mat.png"
$ make -f ./gmakefile test search="snes_tutorials-ex69_p2p1" EXTRA_OPTIONS="-dm_preallocate_only -mat_ignore_zero_entries -prec_mat_ignore_zero_entries -ksp_view_mat draw -prec_mat_view draw -draw_save $PETSC_DIR/mat_sparse.png"
System matrix# |
System matrix with sparse stencil# |
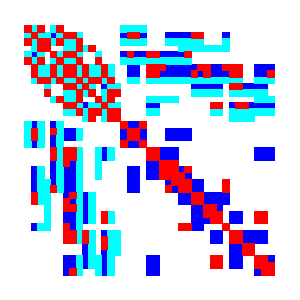
Matrix used to construct the preconditioner# |
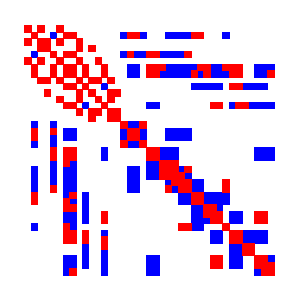
Matrix used to construct the preconditioner with sparse stencil# |
If we want to check the convergence of the solver, we can also do that using options. Both the linear and nonlinear solvers converge in a single iteration, which is exactly what we want. In order to have this happen, we must have the tolerance on both the outer KSP solver and the inner Schur complement solver be low enough. Notice that the sure complement solver is used twice, and converges in seven iterates each time.
$ make -f ./gmakefile test search="snes_tutorials-ex69_p2p1" EXTRA_OPTIONS="-snes_monitor -ksp_monitor_true_residual -ksp_converged_reason -fieldsplit_pressure_ksp_converged_reason"
0 SNES Function norm 1.170604545948e-01
Linear fieldsplit_pressure_ solve converged due to CONVERGED_RTOL iterations 7
0 KSP preconditioned resid norm 4.965098891419e-01 true resid norm 1.170604545948e-01 ||r(i)||/||b|| 1.000000000000e+00
Linear fieldsplit_pressure_ solve converged due to CONVERGED_RTOL iterations 7
1 KSP preconditioned resid norm 9.236813926190e-11 true resid norm 1.460072673561e-12 ||r(i)||/||b|| 1.247280884579e-11
Linear solve converged due to CONVERGED_ATOL iterations 1
1 SNES Function norm 1.460070661322e-12
We can look at the scalability of the solve by refining the mesh. We see that the Schur complement solve looks robust to grid refinement.
$ make -f ./gmakefile test search="snes_tutorials-ex69_p2p1" EXTRA_OPTIONS="-dm_refine 2 -snes_monitor -ksp_monitor_true_residual -ksp_converged_reason -fieldsplit_pressure_ksp_converged_reason"
0 SNES Function norm 3.503062983054e-02
Linear fieldsplit_pressure_ solve converged due to CONVERGED_RTOL iterations 8
0 KSP preconditioned resid norm 9.943095979973e-01 true resid norm 3.503062983054e-02 ||r(i)||/||b|| 1.000000000000e+00
Linear fieldsplit_pressure_ solve converged due to CONVERGED_RTOL iterations 8
1 KSP preconditioned resid norm 1.148772629230e-10 true resid norm 2.693482255004e-13 ||r(i)||/||b|| 7.688934706664e-12
Linear solve converged due to CONVERGED_RTOL iterations 1
1 SNES Function norm 2.693649920420e-13
$ make -f ./gmakefile test search="snes_tutorials-ex69_p2p1" EXTRA_OPTIONS="-dm_refine 4 -snes_monitor -ksp_monitor_true_residual -ksp_converged_reason -fieldsplit_pressure_ksp_converged_reason"
0 SNES Function norm 8.969202737759e-03
Linear fieldsplit_pressure_ solve converged due to CONVERGED_RTOL iterations 6
0 KSP preconditioned resid norm 3.322375727167e+00 true resid norm 8.969202737759e-03 ||r(i)||/||b|| 1.000000000000e+00
Linear fieldsplit_pressure_ solve converged due to CONVERGED_RTOL iterations 6
1 KSP preconditioned resid norm 6.112282404006e-10 true resid norm 8.543800889926e-14 ||r(i)||/||b|| 9.525708292843e-12
Linear solve converged due to CONVERGED_RTOL iterations 1
1 SNES Function norm 8.543893996362e-14
Starting off with an exact solver allows us to check that the discretization, equations, and boundary conditions are correct. Moreover, choosing the Schur complement formulation, rather than a sparse direct solve, gives us a path to incremental boost the scalability. Our first step will be to replace the direct solve of the momentum operator, which has cost superlinear in \(N\), with a more scalable alternative. Since the operator is still elliptic, despite the viscosity variation, we should be able to use some form of multigrid. We will start with algebraic multigrid because it handles coefficient variation well, even if the setup time is larger than the geometric variant.
$ make -f ./gmakefile test search="snes_tutorials-ex69_p2p1" EXTRA_OPTIONS="-dm_refine 2 -snes_monitor -ksp_monitor_true_residual -ksp_converged_reason -fieldsplit_pressure_ksp_converged_reason -fieldsplit_velocity_pc_type gamg -fieldsplit_velocity_ksp_converged_reason"
0 SNES Function norm 3.503062983054e-02
Linear fieldsplit_velocity_ solve converged due to CONVERGED_RTOL iterations 8
Linear fieldsplit_velocity_ solve converged due to CONVERGED_RTOL iterations 9
Linear fieldsplit_velocity_ solve converged due to CONVERGED_RTOL iterations 9
Linear fieldsplit_velocity_ solve converged due to CONVERGED_RTOL iterations 9
Linear fieldsplit_velocity_ solve converged due to CONVERGED_RTOL iterations 10
Linear fieldsplit_velocity_ solve converged due to CONVERGED_RTOL iterations 9
Linear fieldsplit_velocity_ solve converged due to CONVERGED_RTOL iterations 9
Linear fieldsplit_velocity_ solve converged due to CONVERGED_RTOL iterations 8
Linear fieldsplit_velocity_ solve converged due to CONVERGED_RTOL iterations 8
Linear fieldsplit_pressure_ solve converged due to CONVERGED_RTOL iterations 8
Linear fieldsplit_velocity_ solve converged due to CONVERGED_RTOL iterations 9
0 KSP preconditioned resid norm 9.943097452179e-01 true resid norm 3.503062983054e-02 ||r(i)||/||b|| 1.000000000000e+00
Linear fieldsplit_velocity_ solve converged due to CONVERGED_RTOL iterations 8
Linear fieldsplit_velocity_ solve converged due to CONVERGED_RTOL iterations 9
Linear fieldsplit_velocity_ solve converged due to CONVERGED_RTOL iterations 9
Linear fieldsplit_velocity_ solve converged due to CONVERGED_RTOL iterations 9
Linear fieldsplit_velocity_ solve converged due to CONVERGED_RTOL iterations 10
Linear fieldsplit_velocity_ solve converged due to CONVERGED_RTOL iterations 9
Linear fieldsplit_velocity_ solve converged due to CONVERGED_RTOL iterations 9
Linear fieldsplit_velocity_ solve converged due to CONVERGED_RTOL iterations 8
Linear fieldsplit_velocity_ solve converged due to CONVERGED_RTOL iterations 8
Linear fieldsplit_pressure_ solve converged due to CONVERGED_RTOL iterations 8
Linear fieldsplit_velocity_ solve converged due to CONVERGED_RTOL iterations 9
1 KSP preconditioned resid norm 1.503326145261e-05 true resid norm 1.089276827085e-06 ||r(i)||/||b|| 3.109498265814e-05
Linear fieldsplit_velocity_ solve converged due to CONVERGED_RTOL iterations 10
Linear fieldsplit_velocity_ solve converged due to CONVERGED_RTOL iterations 9
Linear fieldsplit_velocity_ solve converged due to CONVERGED_RTOL iterations 9
Linear fieldsplit_velocity_ solve converged due to CONVERGED_RTOL iterations 9
Linear fieldsplit_velocity_ solve converged due to CONVERGED_RTOL iterations 9
Linear fieldsplit_velocity_ solve converged due to CONVERGED_RTOL iterations 9
Linear fieldsplit_velocity_ solve converged due to CONVERGED_RTOL iterations 9
Linear fieldsplit_velocity_ solve converged due to CONVERGED_RTOL iterations 9
Linear fieldsplit_velocity_ solve converged due to CONVERGED_RTOL iterations 9
Linear fieldsplit_velocity_ solve converged due to CONVERGED_RTOL iterations 9
Linear fieldsplit_pressure_ solve converged due to CONVERGED_RTOL iterations 9
Linear fieldsplit_velocity_ solve converged due to CONVERGED_RTOL iterations 10
2 KSP preconditioned resid norm 1.353007845554e-10 true resid norm 6.056095141823e-11 ||r(i)||/||b|| 1.728799959098e-09
Linear solve converged due to CONVERGED_RTOL iterations 2
1 SNES Function norm 6.056096909907e-11
This looks alright, but the number of iterates grows with refinement. At 3 refinements, it is 16, 30 at 4 refinements, and 70 at 5 refinements. Increasing the number of smoother iterates to four, -fieldsplit_velocity_mg_levels_ksp_max_it 4, brings down the number of iterates, but not the growth. Using w-cycles and full multigrid does not help either. It is likely that the coarse grids made by MIS are inaccurate for the \(P_2\) discretization.
We can instead use geometric multigrid, and we would hope get more accurate coarse bases. The -dm_refine_hierarchy allows us to make a hierarchy of refined meshes and sets the number of multigrid levels automatically. Then all we need to specify is -fieldsplit_velocity_pc_type mg, as we see in the test
suffix: p2p1_gmg
TODO: broken (requires subDMs hooks)
requires: triangle
args: -dm_plex_separate_marker -dm_refine_hierarchy 2 -vel_petscspace_degree 2 -pres_petscspace_degree 1 \
-snes_error_if_not_converged -dmsnes_check .001 \
-ksp_type fgmres -ksp_rtol 1.e-9 -ksp_error_if_not_converged -pc_use_amat \
-pc_type fieldsplit -pc_fieldsplit_type schur -pc_fieldsplit_schur_factorization_type full -pc_fieldsplit_schur_precondition a11 \
-fieldsplit_velocity_pc_type mg \
-fieldsplit_pressure_ksp_rtol 1.e-9 -fieldsplit_pressure_pc_type lu
This behaves well for the initial mesh,
$ make -f ./gmakefile test search="snes_tutorials-ex69_p2p1_gmg" EXTRA_OPTIONS="-dm_refine_hierarchy 2 -snes_monitor -ksp_monitor_true_residual -ksp_converged_reason -fieldsplit_pressure_ksp_converged_reason -fieldsplit_velocity_ksp_converged_reason"
0 SNES Function norm 3.503062983054e-02
0 KSP unpreconditioned resid norm 3.503062983054e-02 true resid norm 3.503062983054e-02 ||r(i)||/||b|| 1.000000000000e+00
Linear fieldsplit_velocity_ solve converged due to CONVERGED_RTOL iterations 4
Linear fieldsplit_velocity_ solve converged due to CONVERGED_RTOL iterations 4
Linear fieldsplit_velocity_ solve converged due to CONVERGED_RTOL iterations 4
Linear fieldsplit_velocity_ solve converged due to CONVERGED_RTOL iterations 4
Linear fieldsplit_velocity_ solve converged due to CONVERGED_RTOL iterations 4
Linear fieldsplit_velocity_ solve converged due to CONVERGED_RTOL iterations 5
Linear fieldsplit_velocity_ solve converged due to CONVERGED_RTOL iterations 5
Linear fieldsplit_velocity_ solve converged due to CONVERGED_RTOL iterations 4
Linear fieldsplit_velocity_ solve converged due to CONVERGED_RTOL iterations 4
Linear fieldsplit_pressure_ solve converged due to CONVERGED_RTOL iterations 8
Linear fieldsplit_velocity_ solve converged due to CONVERGED_RTOL iterations 4
1 KSP unpreconditioned resid norm 4.643855168829e-06 true resid norm 4.643855168807e-06 ||r(i)||/||b|| 1.325655630878e-04
Linear fieldsplit_velocity_ solve converged due to CONVERGED_RTOL iterations 5
Linear fieldsplit_velocity_ solve converged due to CONVERGED_RTOL iterations 5
Linear fieldsplit_velocity_ solve converged due to CONVERGED_RTOL iterations 4
Linear fieldsplit_velocity_ solve converged due to CONVERGED_RTOL iterations 4
Linear fieldsplit_velocity_ solve converged due to CONVERGED_RTOL iterations 4
Linear fieldsplit_velocity_ solve converged due to CONVERGED_RTOL iterations 4
Linear fieldsplit_velocity_ solve converged due to CONVERGED_RTOL iterations 4
Linear fieldsplit_velocity_ solve converged due to CONVERGED_RTOL iterations 4
Linear fieldsplit_velocity_ solve converged due to CONVERGED_RTOL iterations 4
Linear fieldsplit_velocity_ solve converged due to CONVERGED_RTOL iterations 5
Linear fieldsplit_pressure_ solve converged due to CONVERGED_RTOL iterations 9
Linear fieldsplit_velocity_ solve converged due to CONVERGED_RTOL iterations 5
2 KSP unpreconditioned resid norm 1.520240889941e-11 true resid norm 1.520239396618e-11 ||r(i)||/||b|| 4.339743258890e-10
Linear solve converged due to CONVERGED_ATOL iterations 2
1 SNES Function norm 1.520237877998e-11
and is also stable under refinement
$ make -f ./gmakefile test search="snes_tutorials-ex69_p2p1_gmg" EXTRA_OPTIONS="-dm_refine_hierarchy 4 -snes_monitor -ksp_monitor_true_residual -ksp_converged_reason -fieldsplit_pressure_ksp_converged_reason -fieldsplit_velocity_ksp_converged_reason"
0 SNES Function norm 3.503062983054e-02
0 KSP unpreconditioned resid norm 3.503062983054e-02 true resid norm 3.503062983054e-02 ||r(i)||/||b|| 1.000000000000e+00
Linear fieldsplit_velocity_ solve converged due to CONVERGED_RTOL iterations 4
Linear fieldsplit_velocity_ solve converged due to CONVERGED_RTOL iterations 4
Linear fieldsplit_velocity_ solve converged due to CONVERGED_RTOL iterations 4
Linear fieldsplit_velocity_ solve converged due to CONVERGED_RTOL iterations 4
Linear fieldsplit_velocity_ solve converged due to CONVERGED_RTOL iterations 4
Linear fieldsplit_velocity_ solve converged due to CONVERGED_RTOL iterations 5
Linear fieldsplit_velocity_ solve converged due to CONVERGED_RTOL iterations 5
Linear fieldsplit_velocity_ solve converged due to CONVERGED_RTOL iterations 4
Linear fieldsplit_velocity_ solve converged due to CONVERGED_RTOL iterations 4
Linear fieldsplit_pressure_ solve converged due to CONVERGED_RTOL iterations 8
Linear fieldsplit_velocity_ solve converged due to CONVERGED_RTOL iterations 4
1 KSP unpreconditioned resid norm 4.643855168829e-06 true resid norm 4.643855168807e-06 ||r(i)||/||b|| 1.325655630878e-04
Linear fieldsplit_velocity_ solve converged due to CONVERGED_RTOL iterations 5
Linear fieldsplit_velocity_ solve converged due to CONVERGED_RTOL iterations 5
Linear fieldsplit_velocity_ solve converged due to CONVERGED_RTOL iterations 4
Linear fieldsplit_velocity_ solve converged due to CONVERGED_RTOL iterations 4
Linear fieldsplit_velocity_ solve converged due to CONVERGED_RTOL iterations 4
Linear fieldsplit_velocity_ solve converged due to CONVERGED_RTOL iterations 4
Linear fieldsplit_velocity_ solve converged due to CONVERGED_RTOL iterations 4
Linear fieldsplit_velocity_ solve converged due to CONVERGED_RTOL iterations 4
Linear fieldsplit_velocity_ solve converged due to CONVERGED_RTOL iterations 4
Linear fieldsplit_velocity_ solve converged due to CONVERGED_RTOL iterations 5
Linear fieldsplit_pressure_ solve converged due to CONVERGED_RTOL iterations 9
Linear fieldsplit_velocity_ solve converged due to CONVERGED_RTOL iterations 5
2 KSP unpreconditioned resid norm 1.520240889941e-11 true resid norm 1.520239396618e-11 ||r(i)||/||b|| 4.339743258890e-10
Linear solve converged due to CONVERGED_ATOL iterations 2
1 SNES Function norm 1.520237877998e-11
Finally, we can back off the pressure solve. ILU(0) is good enough to maintain a constant number of iterates as we refine the grid. We could continue to refine our preconditioner by playing with the tolerance of the inner multigrid and Schur complement solves, trading fewer inner iterates for more outer iterates.
$ make -f ./gmakefile test search="snes_tutorials-ex69_p2p1_gmg" EXTRA_OPTIONS="-dm_refine_hierarchy 2 -snes_monitor -ksp_monitor_true_residual -ksp_converged_reason -fieldsplit_pressure_ksp_converged_reason -fieldsplit_pressure_pc_type ilu"
0 SNES Function norm 3.503062983054e-02
0 KSP unpreconditioned resid norm 3.503062983054e-02 true resid norm 3.503062983054e-02 ||r(i)||/||b|| 1.000000000000e+00
Linear fieldsplit_pressure_ solve converged due to CONVERGED_RTOL iterations 10
1 KSP unpreconditioned resid norm 4.643855785779e-06 true resid norm 4.643855785812e-06 ||r(i)||/||b|| 1.325655807011e-04
Linear fieldsplit_pressure_ solve converged due to CONVERGED_RTOL iterations 10
2 KSP unpreconditioned resid norm 1.521944777036e-11 true resid norm 1.521942998859e-11 ||r(i)||/||b|| 4.344606437913e-10
Linear solve converged due to CONVERGED_ATOL iterations 2
1 SNES Function norm 1.521943449163e-11
$ make -f ./gmakefile test search="snes_tutorials-ex69_p2p1_gmg" EXTRA_OPTIONS="-dm_refine_hierarchy 4 -snes_monitor -ksp_monitor_true_residual -ksp_converged_reason -fieldsplit_pressure_ksp_converged_reason -fieldsplit_pressure_pc_type ilu"
0 SNES Function norm 8.969202737759e-03
0 KSP unpreconditioned resid norm 8.969202737759e-03 true resid norm 8.969202737759e-03 ||r(i)||/||b|| 1.000000000000e+00
Linear fieldsplit_pressure_ solve converged due to CONVERGED_RTOL iterations 10
1 KSP unpreconditioned resid norm 2.234849111673e-05 true resid norm 2.234849111674e-05 ||r(i)||/||b|| 2.491692045566e-03
Linear fieldsplit_pressure_ solve converged due to CONVERGED_RTOL iterations 10
2 KSP unpreconditioned resid norm 1.205594722917e-10 true resid norm 1.205594316079e-10 ||r(i)||/||b|| 1.344148807121e-08
Linear fieldsplit_pressure_ solve converged due to CONVERGED_RTOL iterations 10
3 KSP unpreconditioned resid norm 1.461086575333e-15 true resid norm 2.284323415523e-15 ||r(i)||/||b|| 2.546852247977e-13
Linear solve converged due to CONVERGED_ATOL iterations 3
1 SNES Function norm 2.317901194143e-15
$ make -f ./gmakefile test search="snes_tutorials-ex69_p2p1_gmg" EXTRA_OPTIONS="-dm_refine_hierarchy 6 -snes_monitor -ksp_monitor_true_residual -ksp_converged_reason -fieldsplit_pressure_ksp_converged_reason -fieldsplit_pressure_pc_type ilu"
0 SNES Function norm 2.252260693635e-03
0 KSP unpreconditioned resid norm 2.252260693635e-03 true resid norm 2.252260693635e-03 ||r(i)||/||b|| 1.000000000000e+00
Linear fieldsplit_pressure_ solve converged due to CONVERGED_RTOL iterations 9
1 KSP unpreconditioned resid norm 1.220195757583e-05 true resid norm 1.220195757579e-05 ||r(i)||/||b|| 5.417648858445e-03
Linear fieldsplit_pressure_ solve converged due to CONVERGED_RTOL iterations 10
2 KSP unpreconditioned resid norm 2.683367607036e-09 true resid norm 2.683367591382e-09 ||r(i)||/||b|| 1.191410745197e-06
Linear fieldsplit_pressure_ solve converged due to CONVERGED_RTOL iterations 10
3 KSP unpreconditioned resid norm 5.510932827474e-13 true resid norm 5.511665167379e-13 ||r(i)||/||b|| 2.447170162386e-10
Linear solve converged due to CONVERGED_ATOL iterations 3
1 SNES Function norm 5.511916500930e-13
We can make the problem harder by increasing the wave number and size of the viscosity perturbation. If we set the \(B\) parameter to 6.9, we have a factor of one million increase in viscosity across the cell. At this scale, we see that we lose enough accuracy in our Jacobian calculation to defeat our Taylor test, but we are still able to solve the problem efficiently.
$ make -f ./gmakefile test search="snes_tutorials-ex69_p2p1_gmg" EXTRA_OPTIONS="-dm_refine_hierarchy 2 -snes_monitor -ksp_monitor_true_residual -ksp_converged_reason -fieldsplit_pressure_ksp_converged_reason -fieldsplit_pressure_pc_type ilu -m 2 -n 2 -B 6.9"
L_2 Error: [4.07817e-06, 0.0104694]
L_2 Residual: 0.0145403
Taylor approximation converging at order 1.00
0 SNES Function norm 3.421266970274e-02
0 KSP unpreconditioned resid norm 3.421266970274e-02 true resid norm 3.421266970274e-02 ||r(i)||/||b|| 1.000000000000e+00
Linear fieldsplit_pressure_ solve converged due to CONVERGED_RTOL iterations 21
1 KSP unpreconditioned resid norm 2.066264276201e-05 true resid norm 2.066264276201e-05 ||r(i)||/||b|| 6.039471032675e-04
Linear fieldsplit_pressure_ solve converged due to CONVERGED_RTOL iterations 20
2 KSP unpreconditioned resid norm 1.295461366009e-10 true resid norm 1.295461419342e-10 ||r(i)||/||b|| 3.786496144842e-09
Linear fieldsplit_pressure_ solve converged due to CONVERGED_RTOL iterations 20
3 KSP unpreconditioned resid norm 1.954355290546e-15 true resid norm 1.954135246291e-15 ||r(i)||/||b|| 5.711729786858e-14
Linear solve converged due to CONVERGED_ATOL iterations 3
1 SNES Function norm 1.946196473520e-15
$ make -f ./gmakefile test search="snes_tutorials-ex69_p2p1_gmg" EXTRA_OPTIONS="-dm_refine_hierarchy 6 -snes_monitor -ksp_monitor_true_residual -ksp_converged_reason -fieldsplit_pressure_ksp_converged_reason -fieldsplit_pressure_pc_type ilu -m 2 -n 2 -B 6.9"
L_2 Error: [1.52905e-09, 4.72606e-05]
L_2 Residual: 7.18836e-06
Taylor approximation converging at order 1.00
0 SNES Function norm 2.252034794902e-03
0 KSP unpreconditioned resid norm 2.252034794902e-03 true resid norm 2.252034794902e-03 ||r(i)||/||b|| 1.000000000000e+00
Linear fieldsplit_pressure_ solve converged due to CONVERGED_RTOL iterations 19
1 KSP unpreconditioned resid norm 1.843225742581e-05 true resid norm 1.843225742582e-05 ||r(i)||/||b|| 8.184712539768e-03
Linear fieldsplit_pressure_ solve converged due to CONVERGED_RTOL iterations 19
2 KSP unpreconditioned resid norm 1.410472862037e-09 true resid norm 1.410472860342e-09 ||r(i)||/||b|| 6.263104209294e-07
Linear fieldsplit_pressure_ solve converged due to CONVERGED_RTOL iterations 19
3 KSP unpreconditioned resid norm 1.051996270409e-14 true resid norm 1.064465321443e-14 ||r(i)||/||b|| 4.726682393419e-12
Linear solve converged due to CONVERGED_ATOL iterations 3
1 SNES Function norm 1.063917948054e-14
Bibliography#
M. G. Knepley, J. Brown, K. Rupp, and B. F. Smith. Achieving high performance with unified residual evaluation. ArXiv e-prints, September 2013. arXiv:1309.1204.